

10.2.3 Ebenen im Raum
Startet man mit einem Vektor im Raum und betrachtet alle Vielfachen , dieses Vektors, so erhält man alle Vektoren, die kollinear zu sind (vgl. Infobox 10.2.1). Zusammen mit einem Aufpunktvektor - und interpretiert als Ortsvektoren - bilden alle diese Vektoren dann die Parameterform einer Geraden, wie sie im vorigen Abschnitt 10.2.2 untersucht wurde. Aufbauend darauf ist es nun natürlich zu fragen, was man erhält, wenn man mit zwei festen (aber nicht kollinearen) Vektoren und startet und dann alle möglichen Vektoren betrachtet, die zu diesen komplanar sind, also alle Vektoren, die man durch ; erhält (vgl. wieder Infobox 10.2.1). Zusammen mit einem Aufpunktvektor ergibt dies eine Verallgemeinerung des Konzepts der Parameterform einer Gerade, nämlich die Parameterform einer Ebene im Raum, welche in der unten stehenden Infobox beschrieben wird.
Für Ebenen werden für gewöhnlich Großbuchstaben (, , , ) als Variablen verwendet. Natürlich ist das Konzept einer Ebene nur im sinnvoll.
Info
10.2.8
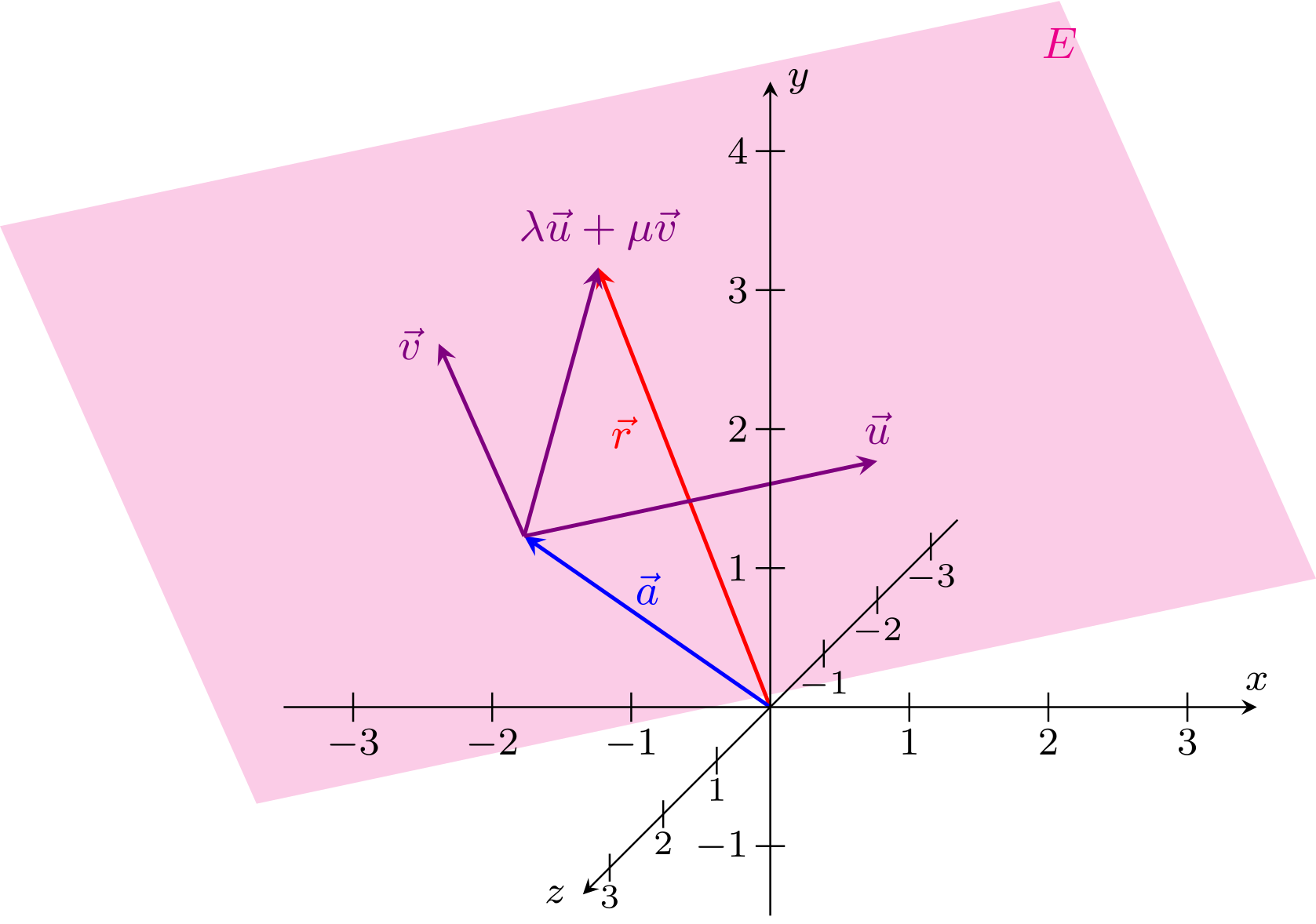
Eine Ebene im Raum ist in Punkt-Richtungsform oder Parameterform gegeben als Menge von Ortsvektoren
oft kurz geschrieben als
Hierbei werden und als Parameter, als Aufpunktvektor und als Richtungsvektoren der Ebene bezeichnet. Die Richtungsvektoren und sind dabei nicht kollinear. Die Ortsvektoren zeigen dann zu den einzelnen Punkten in der Ebene. Der Aufpunktvektor ist der Ortsvektor eines festen Punktes auf der Ebene, der als Aufpunkt bezeichnet wird:
Eine Ebene im Raum ist in Punkt-Richtungsform oder Parameterform gegeben als Menge von Ortsvektoren
oft kurz geschrieben als
Hierbei werden und als Parameter, als Aufpunktvektor und als Richtungsvektoren der Ebene bezeichnet. Die Richtungsvektoren und sind dabei nicht kollinear. Die Ortsvektoren zeigen dann zu den einzelnen Punkten in der Ebene. Der Aufpunktvektor ist der Ortsvektor eines festen Punktes auf der Ebene, der als Aufpunkt bezeichnet wird:
Abbildung 10.2.8: Skizze (C)
Während zwei gegebene Punkte im Raum eine Gerade eindeutig festlegen (siehe Abschnitt 10.2.2), so legen drei gegebene Punkte im Raum eine Ebene eindeutig fest. Aus drei gegebenen Punkten kann relativ einfach die Parameterform der zugehörigen Ebene bestimmt werden. Die Punkt-Richtungsform einer Ebene ist - wie auch diejenige einer Geraden - für eine gegebene Ebene nicht eindeutig. Es gibt immer viele gleichwertige Punkt-Richtungsformen, um eine Ebene darzustellen. Das folgende Beispiel zeigt einige typische Anwendungen.
Beispiel
10.2.9
- Der Aufpunktvektor und die Richtungsvektoren , ergeben eine Ebene
in Parameterform, die in der Höhe parallel zur -Ebene im Koordinatensystem liegt:
Die oben angegebene Parameterform für ist nicht die einzig mögliche. Jeder andere Punkt in ist ebenfalls als Aufpunkt möglich. Zum Beispiel liegt der Punkt, welcher durch den Ortsvektor gegeben ist, in , denn es gilt für :
Dieser kann als Aufpunktvektor verwendet werden. Als andere Richtungsvektoren können alle Vektoren verwendet werden, die zu und komplanar, zueinander aber nicht kollinear sind, zum Beispiel und . Dann ist eine weitere Darstellung von in Parameterform durch
möglich.
- Gegeben sind die drei Punkte , und . Es ist eine Parameterform der Ebene anzugeben, die durch diese drei Punkte festgelegt wird.
Einer der drei Punkte, zum Beispiel , wird als Aufpunkt benutzt. Dann ist der Aufpunktvektor. Als Richtungsvektoren dienen dann die Verbindungsvektoren vom Aufpunkt zu den anderen beiden Punkten:
Folglich ist
eine korrekte Darstellung von in Parameterform.
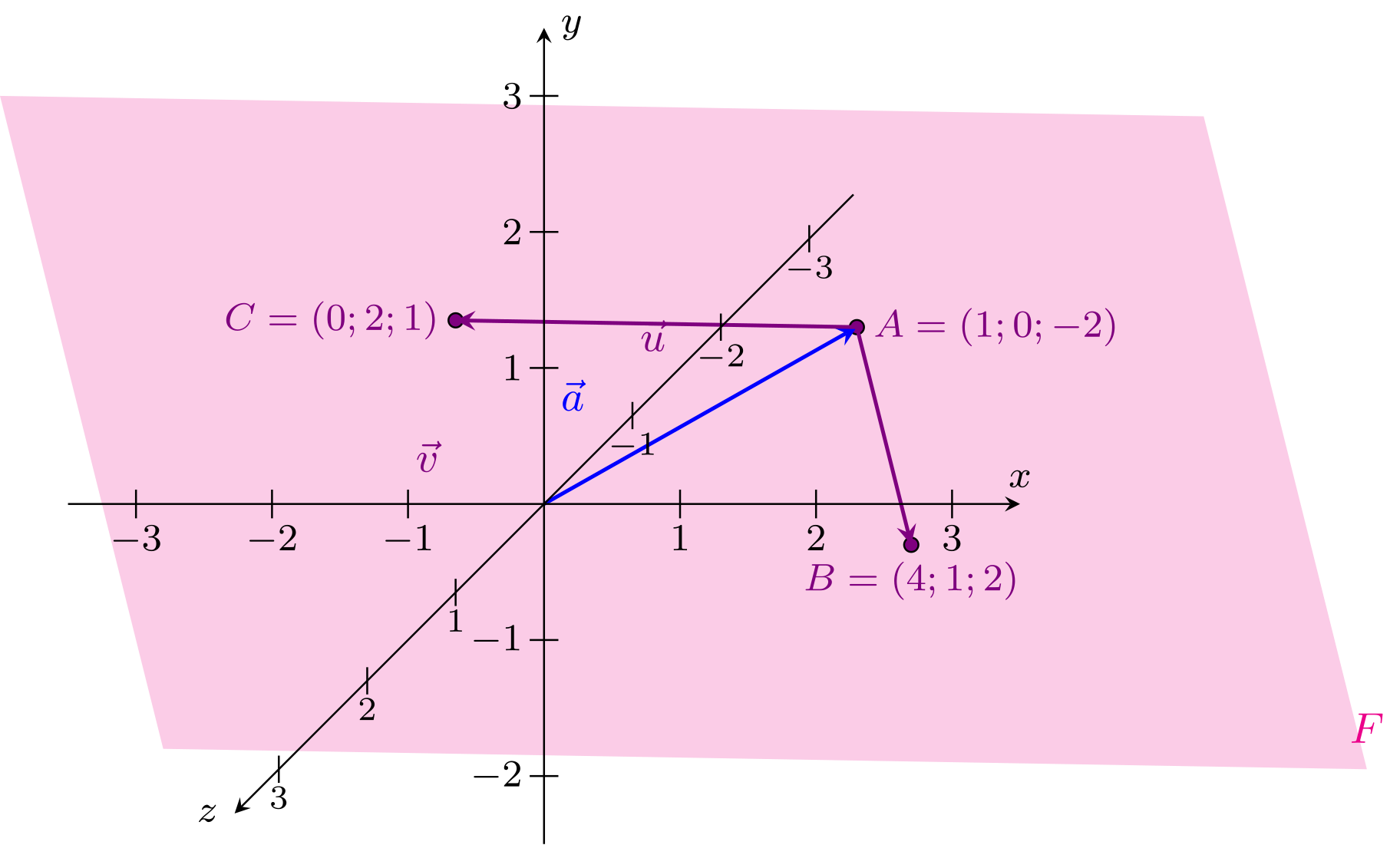 Abbildung 10.2.9: Skizze (C)
Abbildung 10.2.9: Skizze (C)
- Von zwei Punkten und ist zu überprüfen, ob sie in der Ebene , die in Parameterform durch
gegeben ist, liegen.
Damit bzw. in liegen, müssen sich ihre Ortsvektoren jeweils für bestimmte Parameterwerte und als Ortsvektoren ergeben, es müsste also bzw. für jeweils geeignete und gelten. Es ergibt sich für :
Die erste Komponente dieser Vektorgleichung liefert offenbar . Dies in die zweite und dritte Komponente eingesetzt liefert zwei Gleichungen für , die sich gegenseitig widersprechen:
und
Somit kann es keine Parameterwerte und geben, die in der Parameterform der Ebene den Ortsvektor liefern. Folglich liegt nicht in . Für hingegen berechnet man:
Die erste Komponente liefert nun , was eingesetzt in die zweite und dritte Komponente auf
und
führt. Hier ergibt sich also kein Widerspruch, sondern es stellt sich heraus, dass genau die Parameterwerte und den Ortsvektor liefern. Somit liegt in .
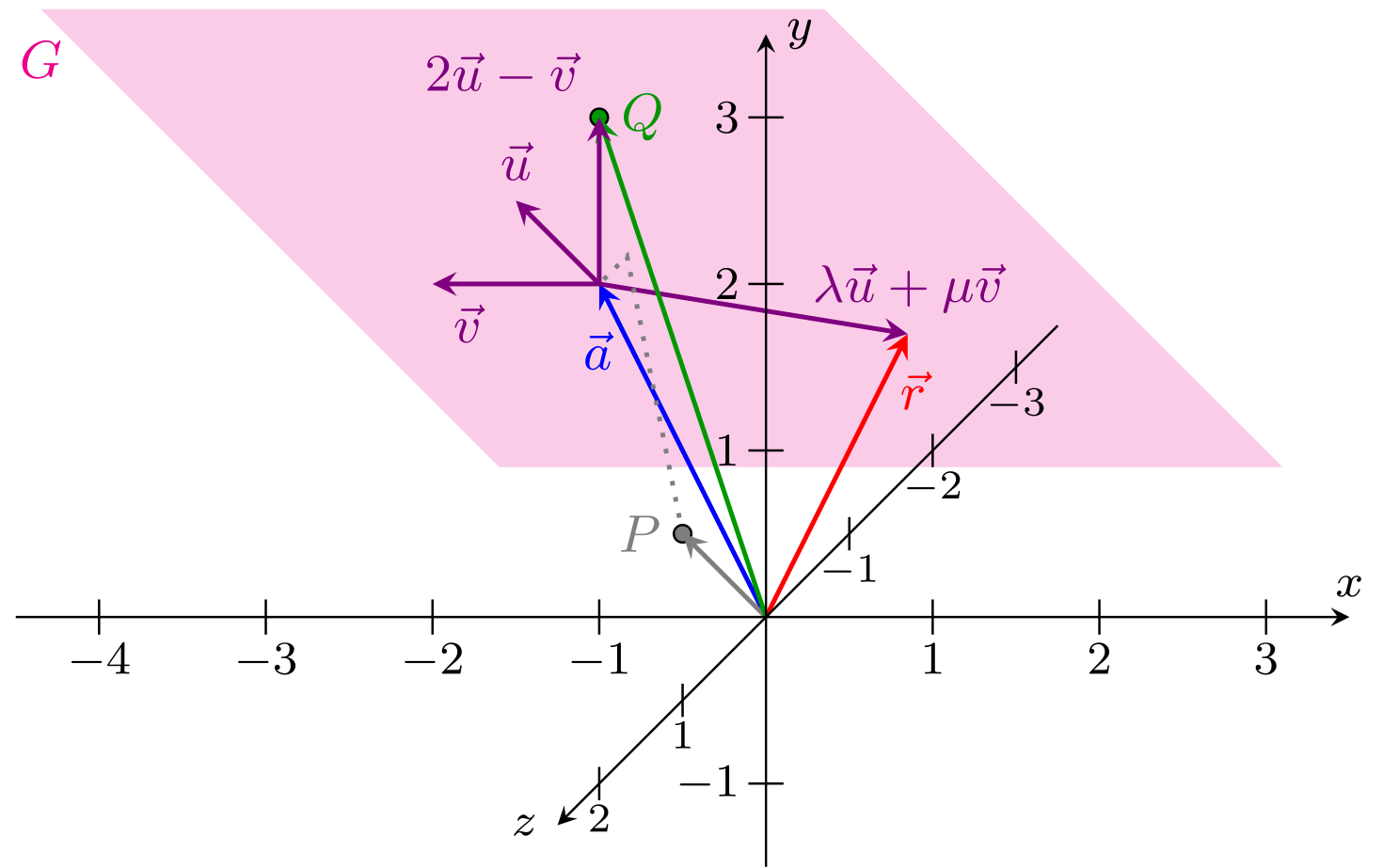 Abbildung 10.2.10: Skizze (C)
Abbildung 10.2.10: Skizze (C)
Neben der Möglichkeit mittels dreier fester Punkte kann eine Ebene im Raum auch durch eine Gerade und einen Punkt, der nicht auf der Gerade liegt, festgelegt werden. Das folgende Beispiel zeigt, wie dies auf den Fall von drei gegebenen Punkten zurückgeführt werden kann.
Beispiel
10.2.10
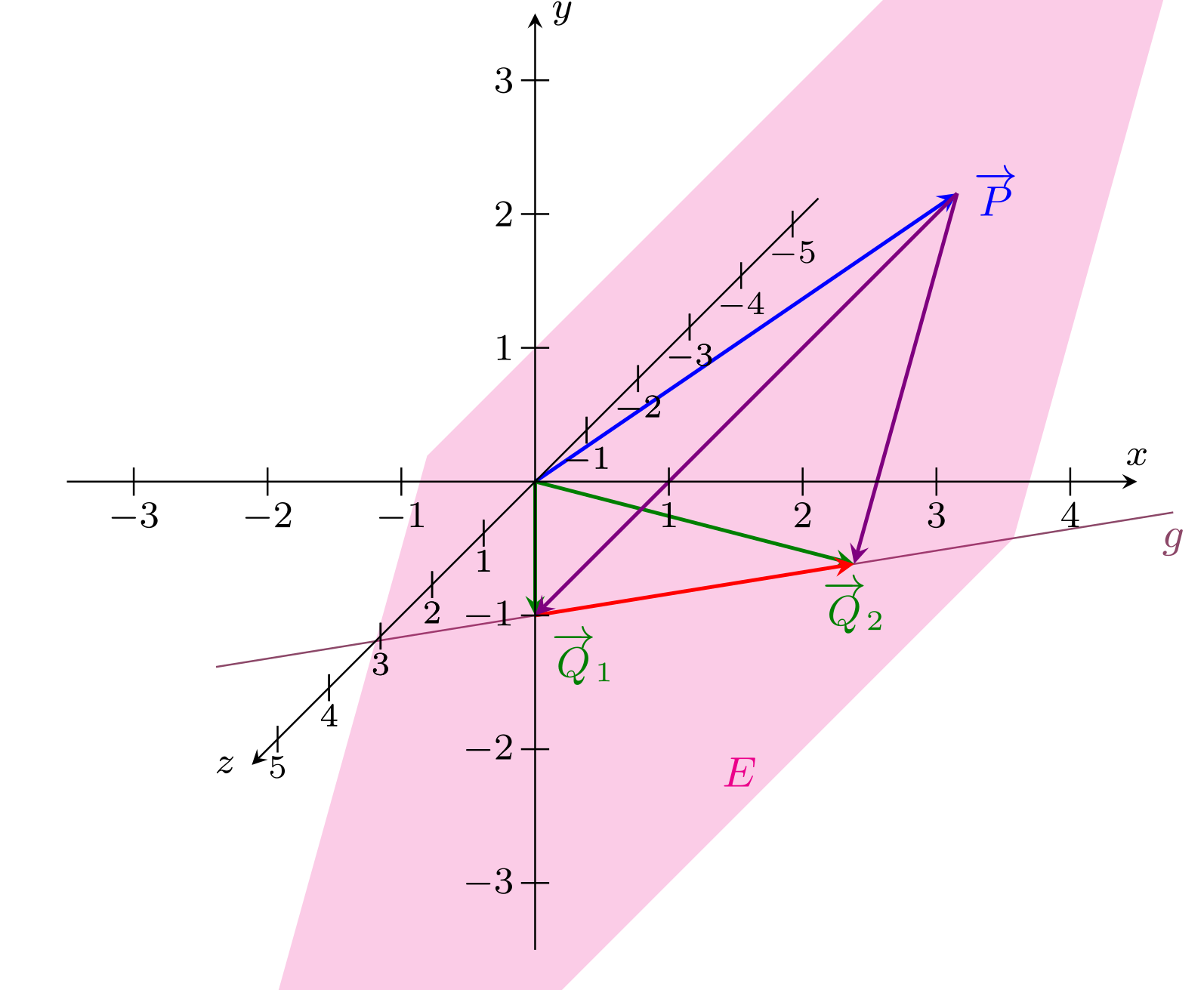
Gegeben ist der Punkt und die Gerade in Parameterform durch
Der Punkt befindet sich nicht auf , da es keinen Parameter gibt, so dass
gilt, denn schon die zweite Komponente dieser Vektorgleichung enthält den Widerspruch . So legen der Punkt und die Gerade eine Ebene eindeutig fest, die sowohl als auch enthält. Eine Parameterform dieser Ebene erhält man, indem man sich zum Punkt , der als Aufpunkt benutzt werden kann, noch zwei weitere Punkte auf wählt und dann genauso wie im obigen Beispiel bei gegebenen drei Punkten vorgeht. Folglich ist hier der Aufpunktvektor
und zwei weitere Punkte und auf ergeben sich für zwei verschiedene Werte des Parameters , zum Beispiel und . Die Wahl ergibt den Aufpunkt der Geraden. Als Ortsvektor:
Die Wahl führt auf
Damit ergeben sich die Richtungsvektoren
und
Somit lautet eine Punkt-Richtungsform der Ebene :
Gegeben ist der Punkt und die Gerade in Parameterform durch
Der Punkt befindet sich nicht auf , da es keinen Parameter gibt, so dass
gilt, denn schon die zweite Komponente dieser Vektorgleichung enthält den Widerspruch . So legen der Punkt und die Gerade eine Ebene eindeutig fest, die sowohl als auch enthält. Eine Parameterform dieser Ebene erhält man, indem man sich zum Punkt , der als Aufpunkt benutzt werden kann, noch zwei weitere Punkte auf wählt und dann genauso wie im obigen Beispiel bei gegebenen drei Punkten vorgeht. Folglich ist hier der Aufpunktvektor
und zwei weitere Punkte und auf ergeben sich für zwei verschiedene Werte des Parameters , zum Beispiel und . Die Wahl ergibt den Aufpunkt der Geraden. Als Ortsvektor:
Die Wahl führt auf
Damit ergeben sich die Richtungsvektoren
und
Somit lautet eine Punkt-Richtungsform der Ebene :
Abbildung 10.2.11: Skizze (C)
Weitere Lagebeziehungen von Ebenen und Geraden - sowie daraus abgeleitet weitere Daten, mit Hilfe derer eine Ebene eindeutig festgelegt werden kann - werden im folgenden Abschnitt 10.2.4 untersucht.
Aufgabe 10.2.11
Die Ebene , welche durch die drei Punkte , und eindeutig festgelegt wird, hat die Parameterform
Bestimmen Sie die fehlenden Komponenten , und .

Die Ebene , welche durch die drei Punkte , und eindeutig festgelegt wird, hat die Parameterform
Bestimmen Sie die fehlenden Komponenten , und .
Aufgabe 10.2.12
Gegeben sind die Punkte , und sowie die Ebene in Parameterform:
Bestimmen Sie die fehlenden Komponenten , und , so dass die Punkte , und in der Ebene liegen.
Gegeben sind die Punkte , und sowie die Ebene in Parameterform:
Bestimmen Sie die fehlenden Komponenten , und , so dass die Punkte , und in der Ebene liegen.