

10.2.4 Lagebeziehung von Geraden und Ebenen im Raum
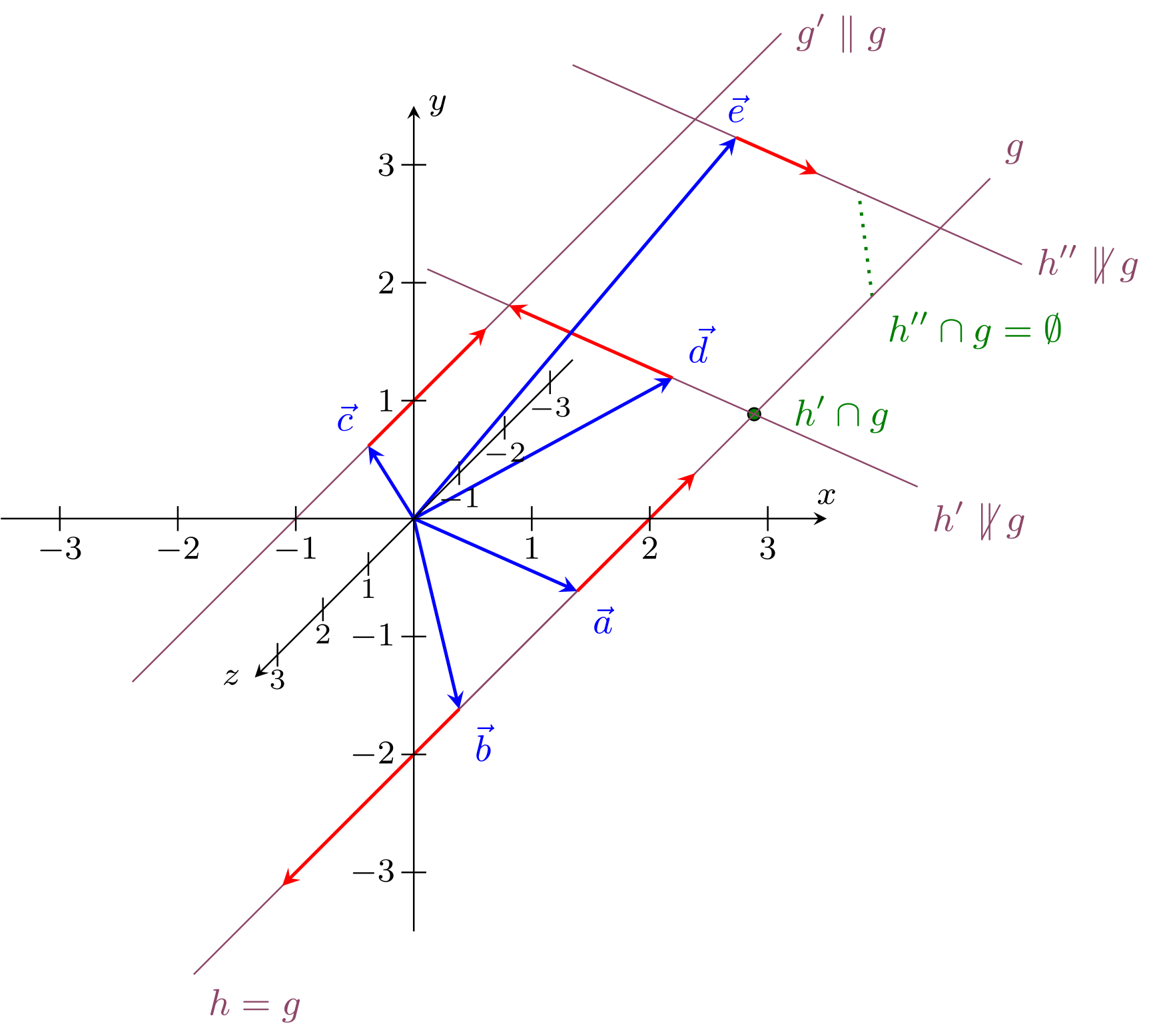
Während es für die Lagebeziehung zweier Geraden in der Ebene nur drei Möglichkeiten gibt (die Geraden sind parallel, identisch oder sie schneiden sich, vgl. Abschnitt 9.2.3), existieren für zwei Geraden im Raum vier Möglichkeiten. Diese werden in der folgenden Infobox zusammengefasst.
Nach den Kriterien, die in obiger Infobox für die vier Möglichkeiten der relativen Lage zweier Geraden aufgeführt sind, geht man in der Praxis so vor, dass man zunächst die beiden Richtungsvektoren auf Kollinearität prüft und dann nach möglichen gemeinsamen Punkten der beiden Geraden sucht. Dies legt schließlich einen der vier Fälle eindeutig fest. Das folgende Beispiel zeigt Anwendungen dieses Vorgehens für alle vier Fälle.
Info
10.2.13
Gegeben sind zwei Geraden im Raum in Punkt-Richtungsform, mit Aufpunktvektor und Richtungsvektor sowie mit Aufpunktvektor und Richtungsvektor :
Für die relative Lage von und gibt es genau vier Möglichkeiten:
Gegeben sind zwei Geraden im Raum in Punkt-Richtungsform, mit Aufpunktvektor und Richtungsvektor sowie mit Aufpunktvektor und Richtungsvektor :
Für die relative Lage von und gibt es genau vier Möglichkeiten:
- Die Geraden sind identisch. In diesem Fall haben und alle Punkte gemeinsam, fallen also zusammen. Dies ist genau dann der Fall, wenn die beiden Richtungsvektoren und kollinear sind und es einen gemeinsamen Punkt gibt.
- Die Geraden sind parallel. Dies ist genau dann der Fall, wenn die beiden Richtungsvektoren und kollinear sind und es keinen gemeinsamen Punkt gibt.
- Die Geraden schneiden sich. In diesem Fall haben und genau einen gemeinsamen Punkt, der Schnittpunkt genannt wird. Dies ist genau dann der Fall, wenn die beiden Richtungsvektoren und nicht kollinear sind und es einen gemeinsamen Punkt gibt.
- Geraden, die weder identisch noch parallel sind und sich auch nicht schneiden, heißen windschief. Dies ist genau dann der Fall, wenn die beiden Richtungsvektoren und nicht kollinear sind und es keinen gemeinsamen Punkt gibt.
Nach den Kriterien, die in obiger Infobox für die vier Möglichkeiten der relativen Lage zweier Geraden aufgeführt sind, geht man in der Praxis so vor, dass man zunächst die beiden Richtungsvektoren auf Kollinearität prüft und dann nach möglichen gemeinsamen Punkten der beiden Geraden sucht. Dies legt schließlich einen der vier Fälle eindeutig fest. Das folgende Beispiel zeigt Anwendungen dieses Vorgehens für alle vier Fälle.
Beispiel
10.2.14
Gegeben sind die vier Geraden , , und in Parameterform:
und
Gegeben sind die vier Geraden , , und in Parameterform:
und
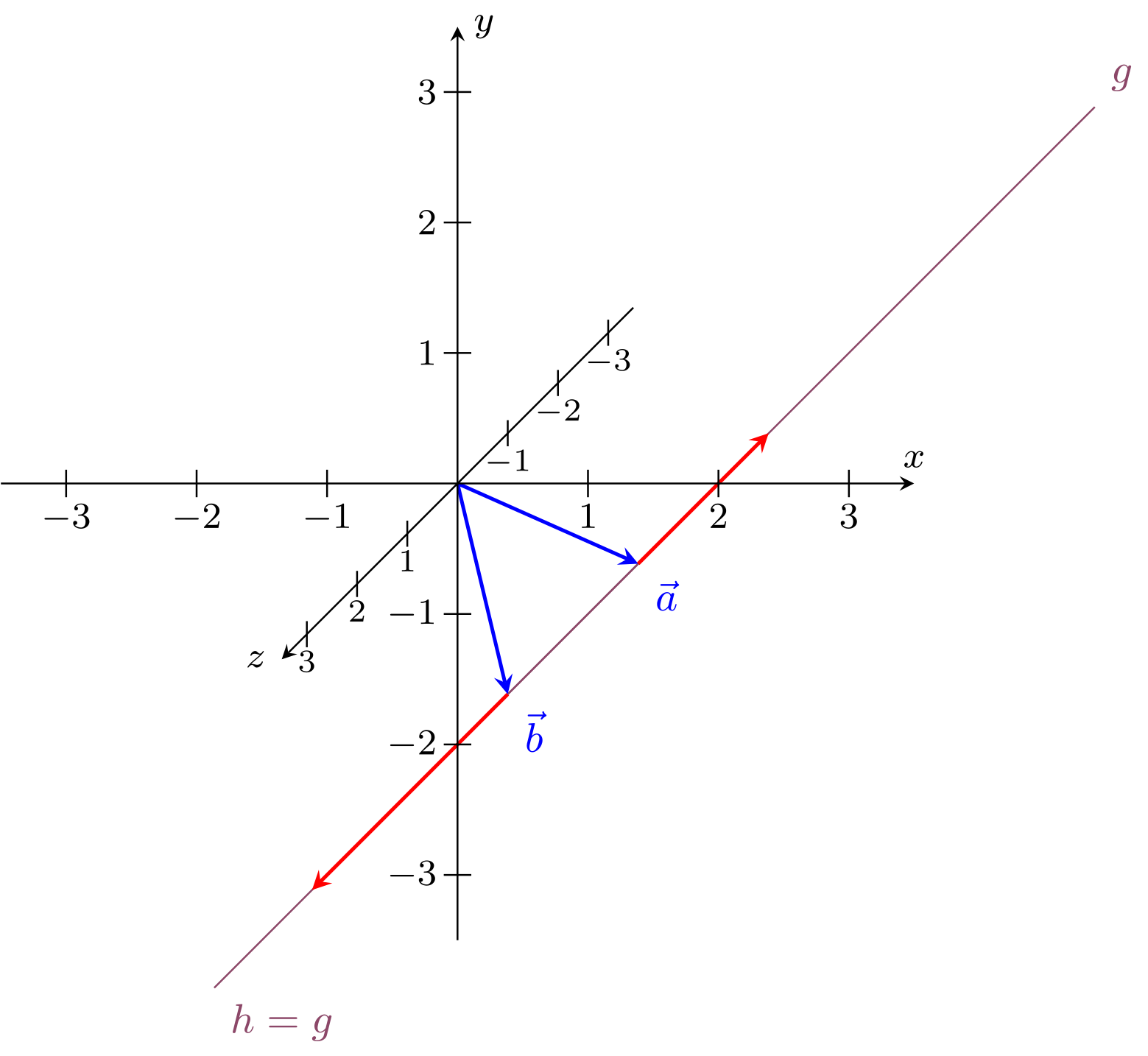
- Die Geraden und sind identisch. Die beiden Richtungsvektoren von und von sind kollinear. Es gilt
Außerdem ist der Punkt, welcher durch den Ortvektor beschrieben wird, in (als Aufpunkt) und enthalten, denn für gilt:
Also ergibt sich in für den Parameterwert .
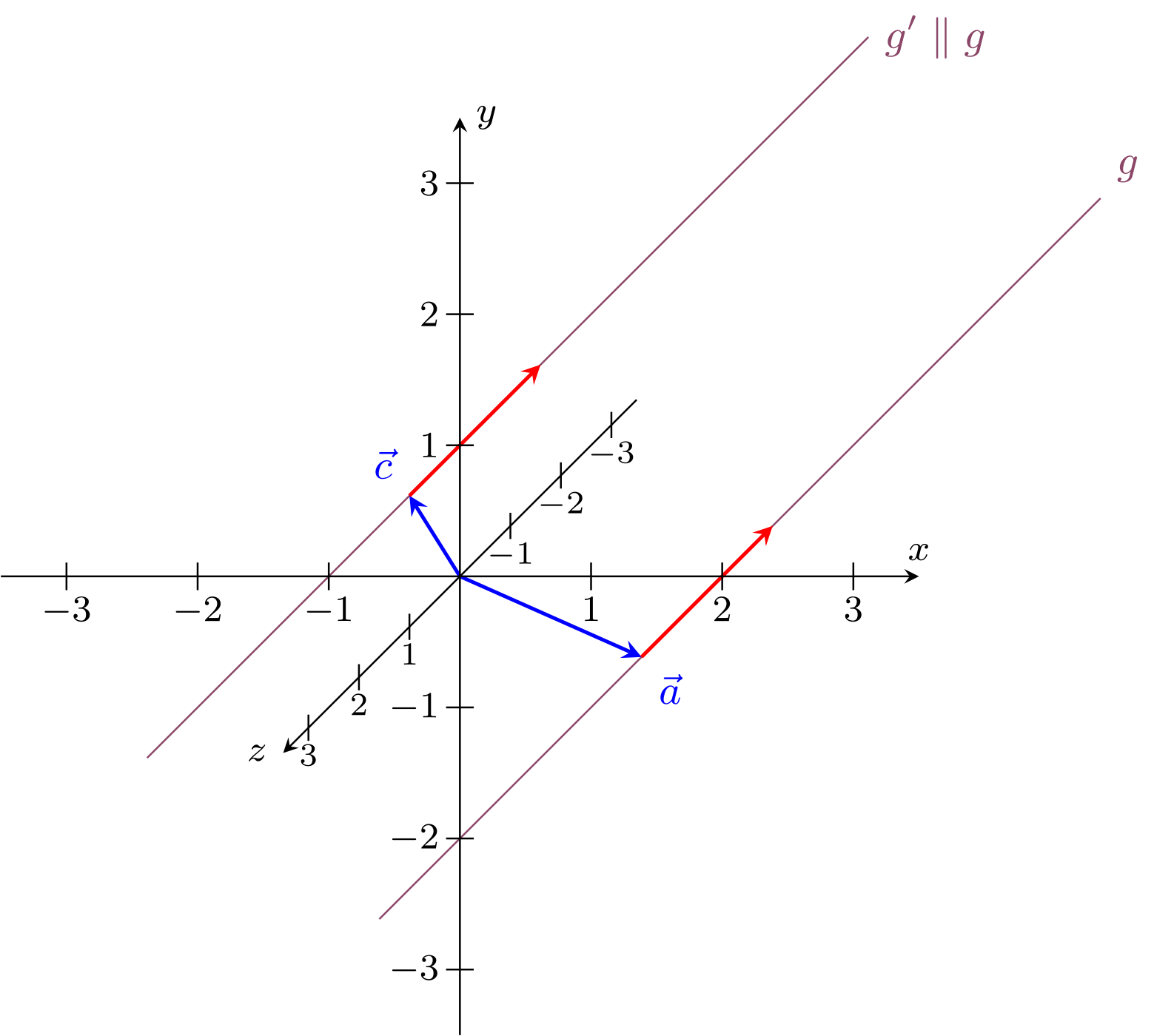
- Die Geraden und (und damit natürlich auch und ) sind parallel. Die beiden Richtungsvektoren von und von sind kollinear. Es gilt
Allerdings haben und keine Punkte gemeinsam. Dies sieht man in diesem Fall folgendermaßen: Der Aufpunkt einer der beiden Geraden ist kein Punkt auf der anderen Geraden. Dann haben die beiden Geraden gar keine gemeinsamen Punkte. Hier kann man zum Beispiel testen, ob sich der Aufpunktvektor der Gerade als Ortsvektor der Gerade ergeben kann:
In dieser Vektorgleichung ergäbe sich in der ersten Komponente und in der zweiten Komponente , was bereits ein Widerspruch ist. Folglich haben die beiden Geraden keine gemeinsamen Punkte.
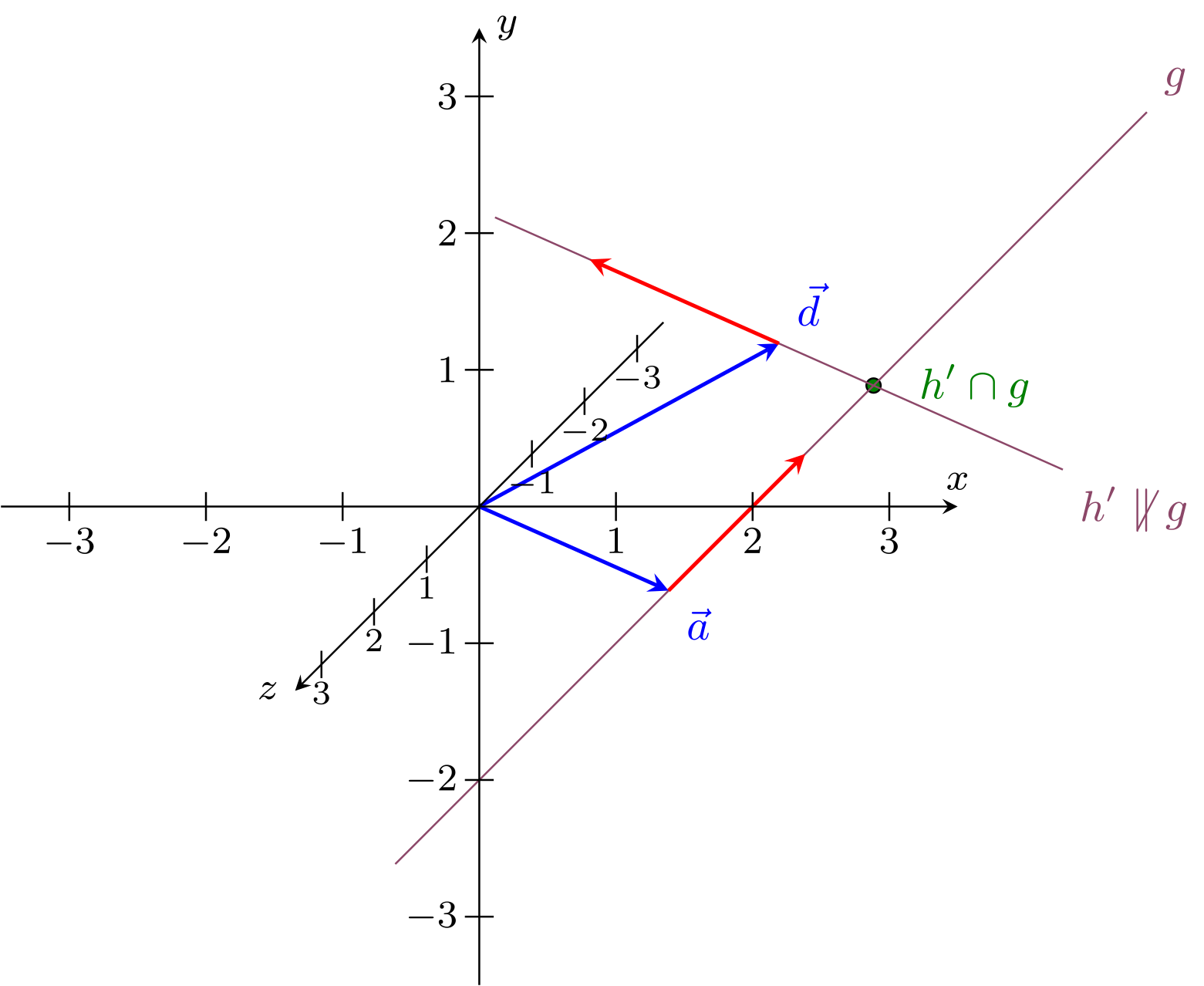
- Die Geraden und schneiden sich. Zunächst sind für diese beiden Geraden die Richtungsvektoren und nicht kollinear. Es gibt keine Zahl , so dass
gilt, denn für die erste Komponente müsste und für die zweite Komponente gelten, was bereits ein Widerspruch ist. Allerdings haben die beiden Geraden einen gemeinsamen Punkt, den man durch Gleichsetzen der Ortsvektoren für und findet:
Hier führen die ersten beiden Komponenten zu den Gleichungen
für und , woraus man und berechnet. Dies eingesetzt in die dritte Komponente ergibt
Die Vektorgleichung für die Ortsvektoren ist also für die Parameterwerte und erfüllt. Folglich ergibt sich der Ortsvektor des Schnittpunkts für den Parameterwert in der Gerade oder auch für den Parameterwert in der Gerade . Man erhält als Schnittpunkt den Punkt .
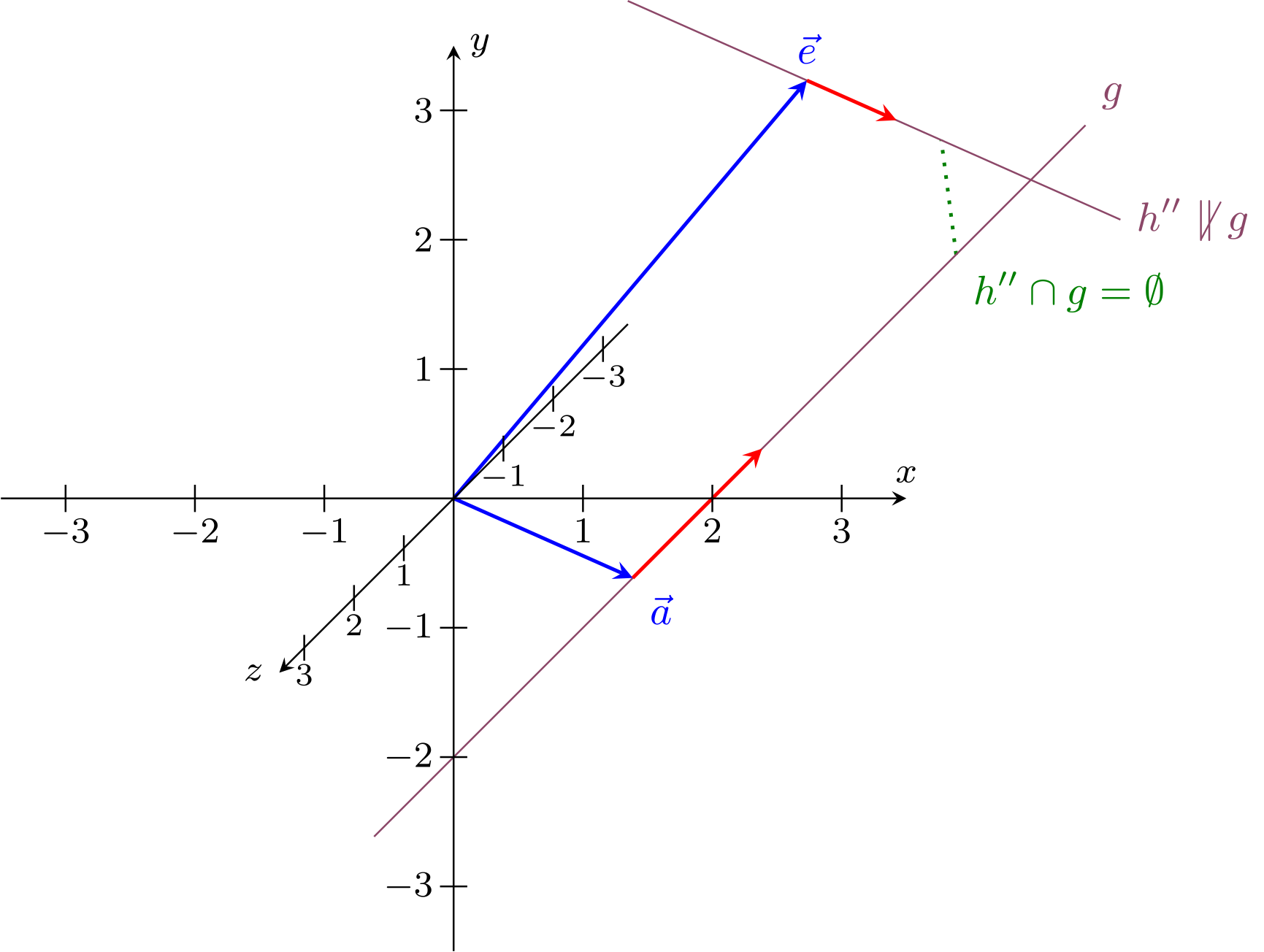
- Die Geraden und (und damit natürlich auch und ) sind windschief. Auch in diesem Fall erhält man analog zum Fall mit Schnittpunkt oben recht schnell, dass die beiden Richtungsvektoren von und von nicht kollinear sind. Nun haben die beiden Geraden aber keinen gemeinsamen Punkt, was man wieder durch Gleichsetzen der Ortsvektoren findet:
Diese Vektorgleichung ist widersprüchlich, das heißt man findet keine Parameterwerte und , die sie erfüllen, und folglich haben und keine gemeinsamen Punkte. Die erste und die zweite Komponente führen auf die beiden Gleichungen
woraus man und berechnet. Setzt man dies aber in die dritte Komponente ein, so ergibt sich der Widerspruch
Aufgabe 10.2.15
Die beiden Geraden
und
schneiden sich, da
Berechnen Sie den Schnittpunkt der beiden Geraden und .

Der Ortsvektor des Schnittpunkts ergibt sich in den Geraden und jeweils für die Parameterwerte
und
.
Die beiden Geraden
und
schneiden sich, da
|
Richtig
| die beiden Richtungsvektoren kollinear sind, | |
|
Richtig
| die beiden Richtungsvektoren nicht kollinear sind, | |
|
Richtig
| die beiden Richtungsvektoren kollinear sind und die Geraden einen gemeinsamen Punkt besitzen, | |
|
Richtig
| die beiden Richtungsvektoren nicht kollinear sind und die Geraden einen gemeinsamen Punkt besitzen, | |
|
Richtig
| die beiden Richtungsvektoren nicht kollinear sind und die Geraden keinen gemeinsamen Punkt besitzen. |
Berechnen Sie den Schnittpunkt der beiden Geraden und .
Der Ortsvektor des Schnittpunkts ergibt sich in den Geraden und jeweils für die Parameterwerte
Hat man zwei Geraden im Raum gegeben, die echt parallel sind oder sich schneiden, so stellt man fest, dass auch diese jeweils eine Ebene eindeutig festlegen:
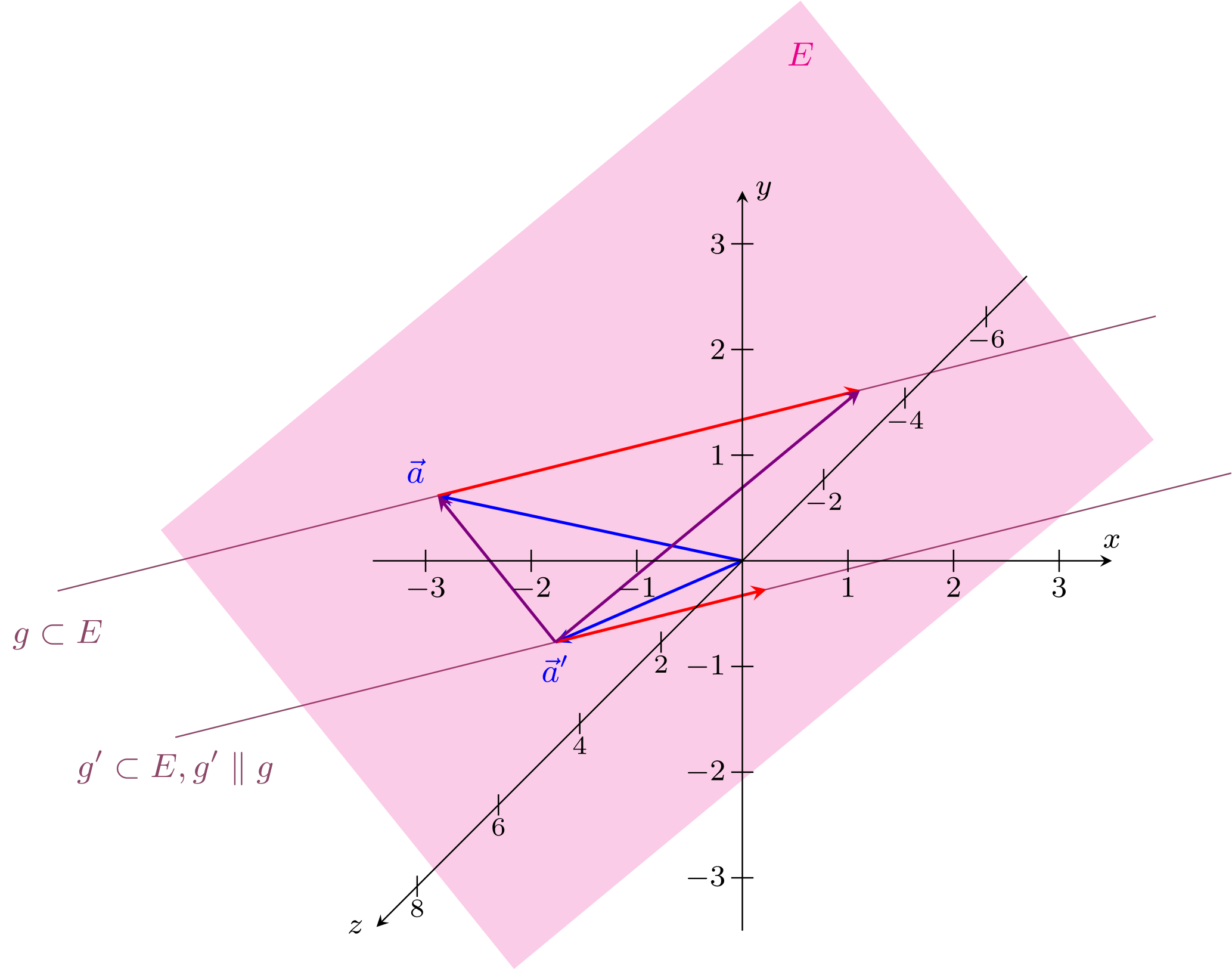
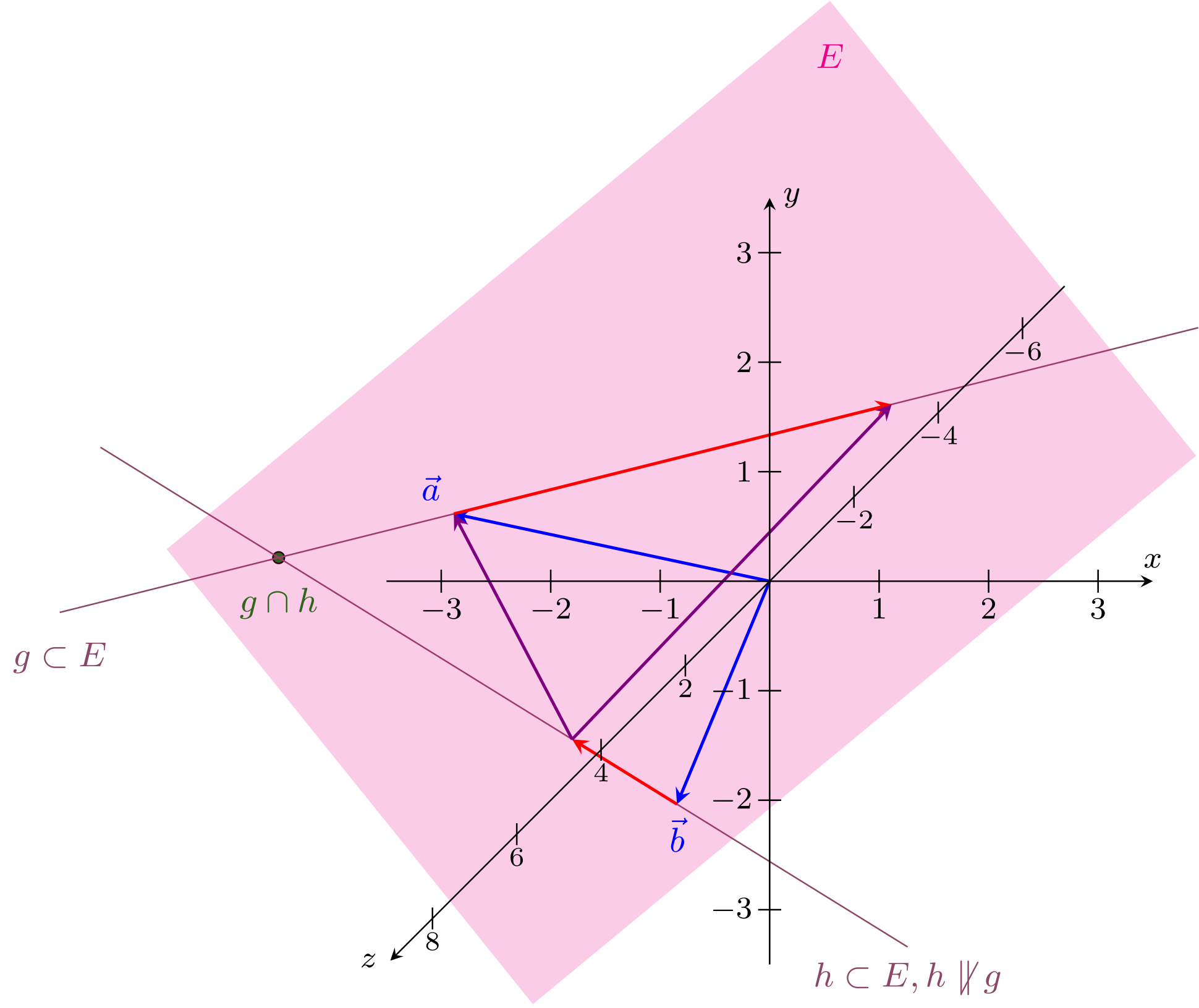
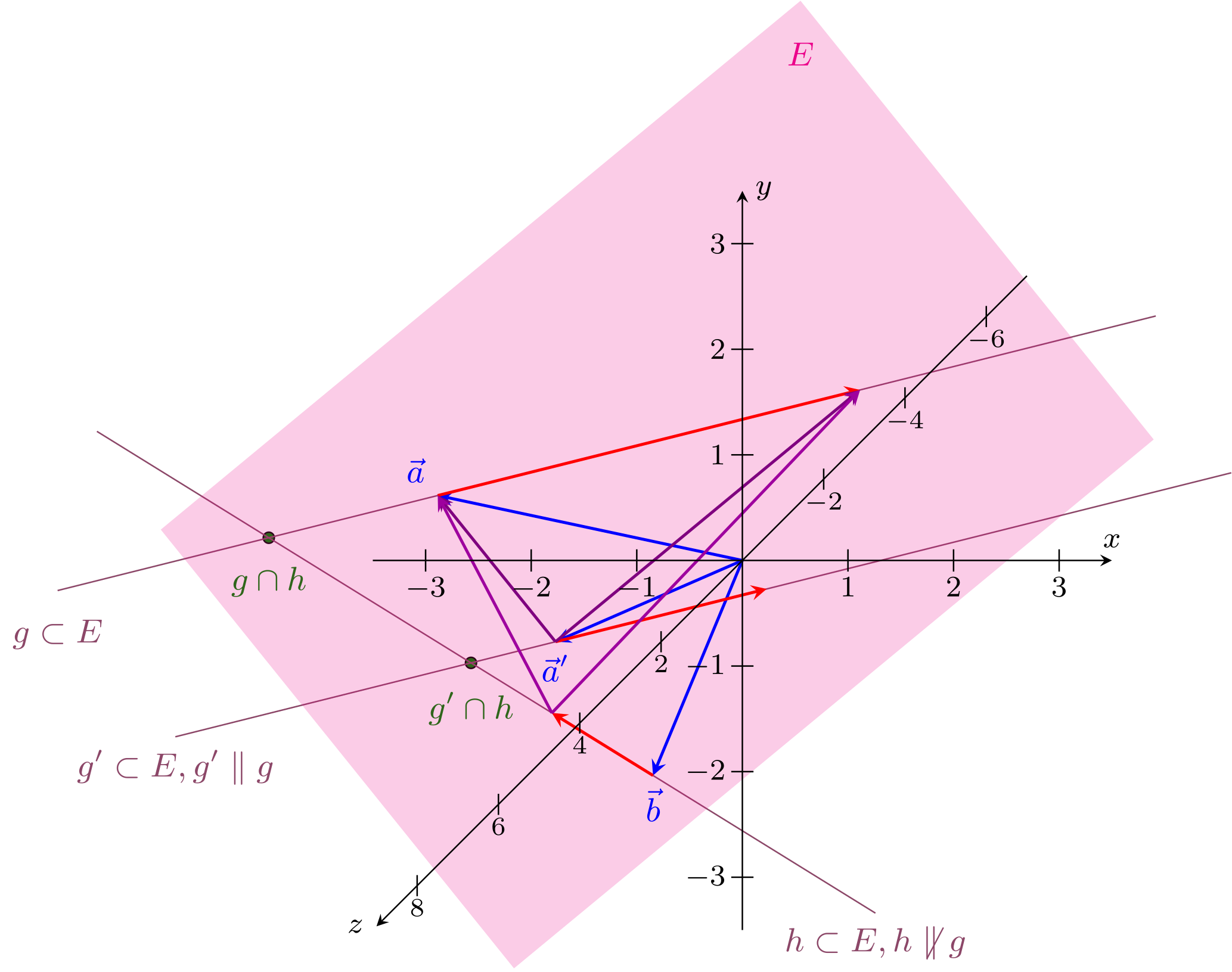
Es handelt sich dabei jeweils um diejenige Ebene, die beide Geraden beinhaltet.
Das folgende Beispiel zeigt, wie man aus zwei echt parallelen oder sich schneidenden Geraden die Parameterform der Ebene bekommt, die durch diese eindeutig festgelegt wird.
Beispiel
10.2.17
- Die beiden Geraden
und
schneiden sich im Punkt (vgl. Aufgabe 10.2.15). Dadurch wird eine Ebene eindeutig festgelegt, die sowohl als auch beinhaltet. Für eine Parameterform von benutzt man die Ortsvektoren von drei geeigneten Punkten, die man aus den Geraden und berechnet. Der Schnittpunkt eignet sich als Aufpunkt von mit dem Aufpunktvektor
Dann ergeben sich noch Ortsvektoren von zwei Punkten und dadurch, dass man zum Beispiel die Parameterwerte und in die Parameterformen der Geraden einsetzt:
Dies ergibt die Richtungsvektoren
und
Somit ist eine mögliche Parameterform von durch
gegeben.
- Die beiden Geraden
und
sind parallel (vgl. Aufgabe 10.2.16). Dadurch wird eine Ebene eindeutig festgelegt, die sowohl als auch beinhaltet. Für eine Parameterform von benutzt man die Ortsvektoren von drei geeigneten Punkten, die man aus den Geraden und berechnet. Es eignen sich die Ortsvektoren von Punkten auf bzw. , die sich für drei Parameterwerte ergeben, zum Beispiel , und :
dient als Aufpunktvektor. Dann erhält man sofort unter Benutzung von
dass für den ersten Richtungsvektor der Ebene genau der Richtungsvektor von benutzt werden kann. Der zweite Richtungsvektor der Ebene ergibt sich aus dem Ortsvektor eines Punktes auf für den Parameterwert , also den Aufpunkt von :
Und folglich ist
der zweite Richtungsvektor von . Eine Parameterform von ist also gegeben durch
Für die Lagebeziehung einer Geraden und einer Ebene im Raum gibt es wieder nur drei Möglichkeiten. Diese sind in der folgenden Infobox zusammengefasst.
Info
10.2.18
Sind eine Gerade mit Aufpunktvektor und Richtungsvektor sowie eine Ebene mit Aufpunktvektor und Richtungsvektoren und im Raum in Parameterform gegeben durch
und
so gibt es für die relative Lage von und genau drei Möglichkeiten:
Sind eine Gerade mit Aufpunktvektor und Richtungsvektor sowie eine Ebene mit Aufpunktvektor und Richtungsvektoren und im Raum in Parameterform gegeben durch
und
so gibt es für die relative Lage von und genau drei Möglichkeiten:
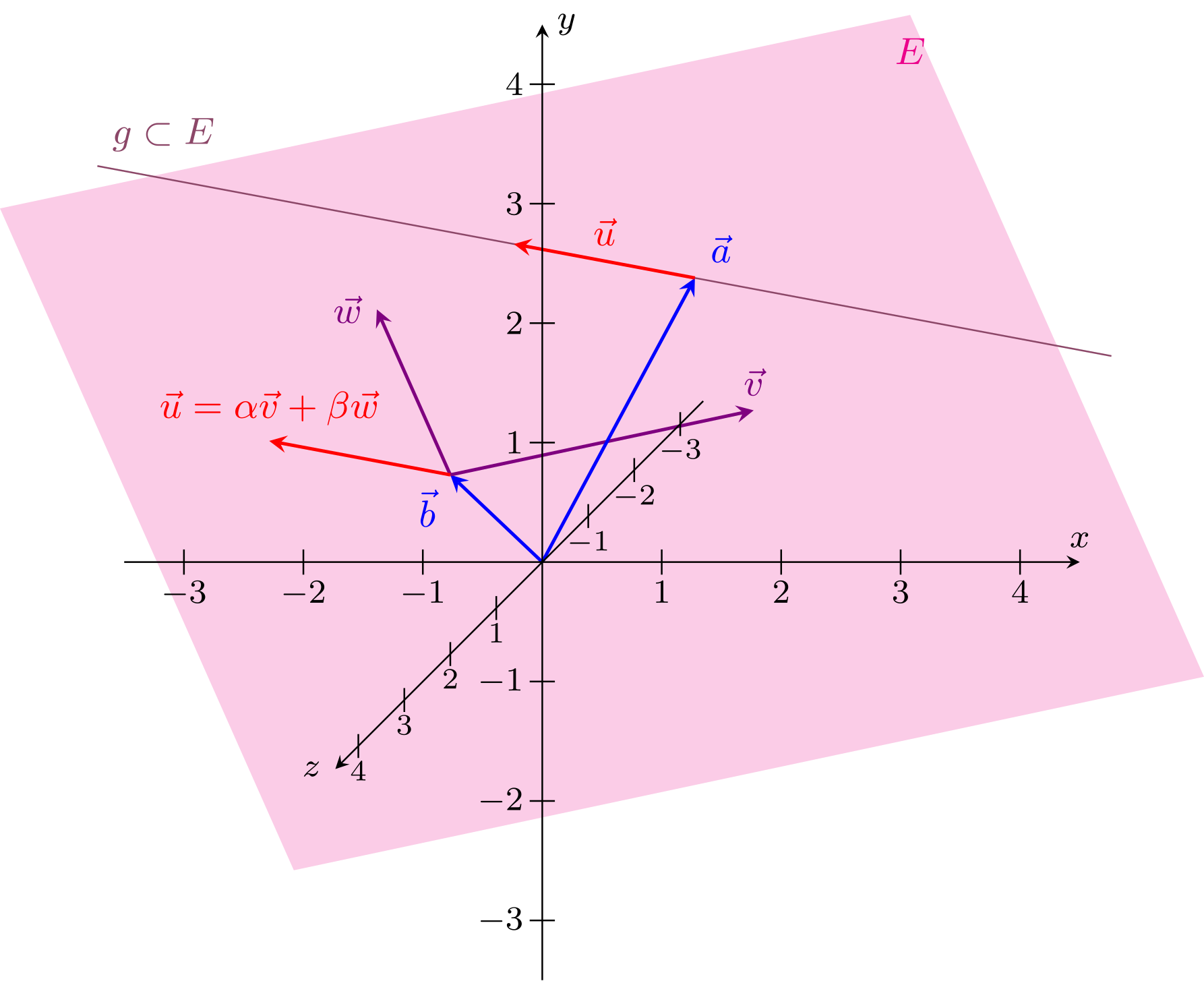
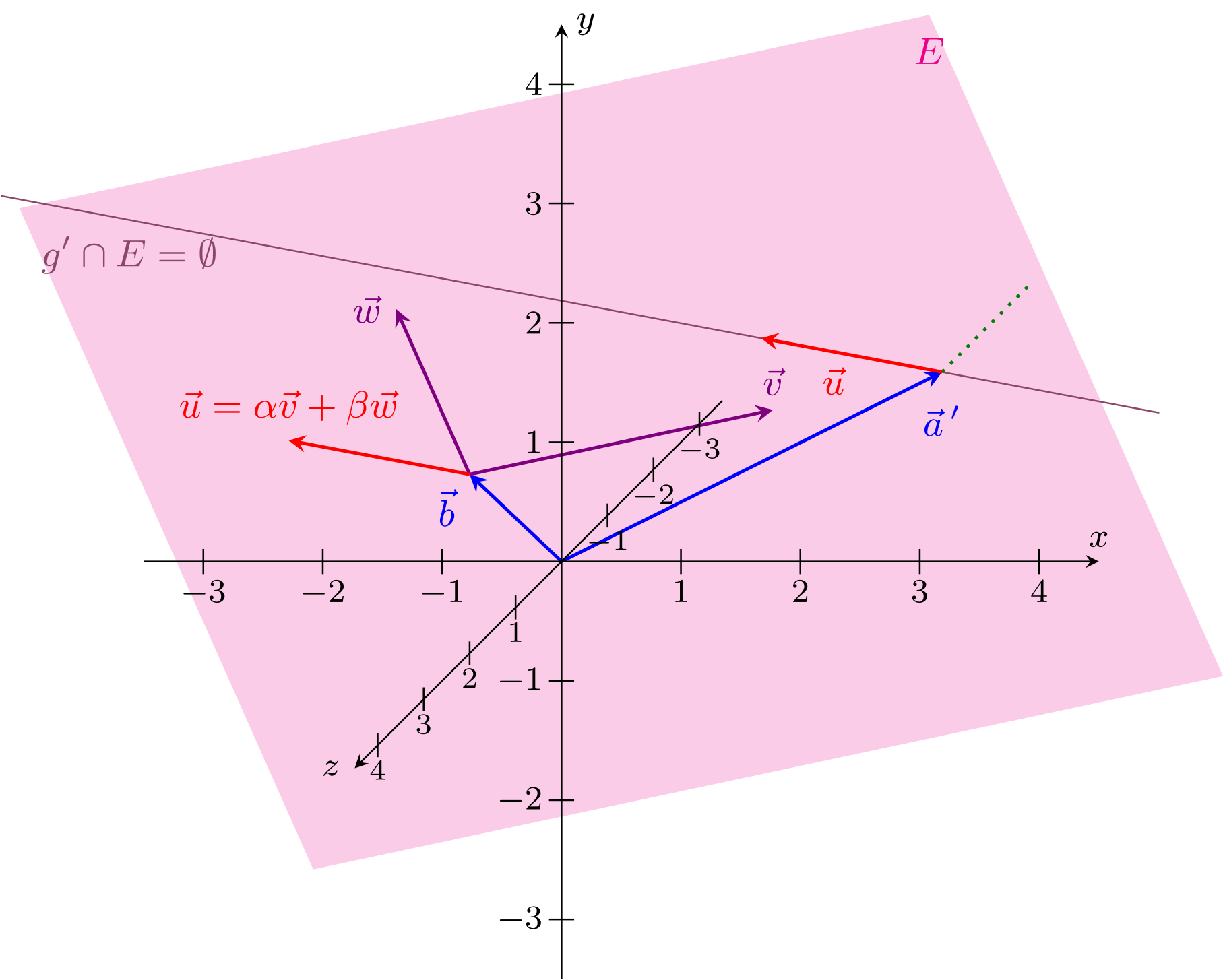
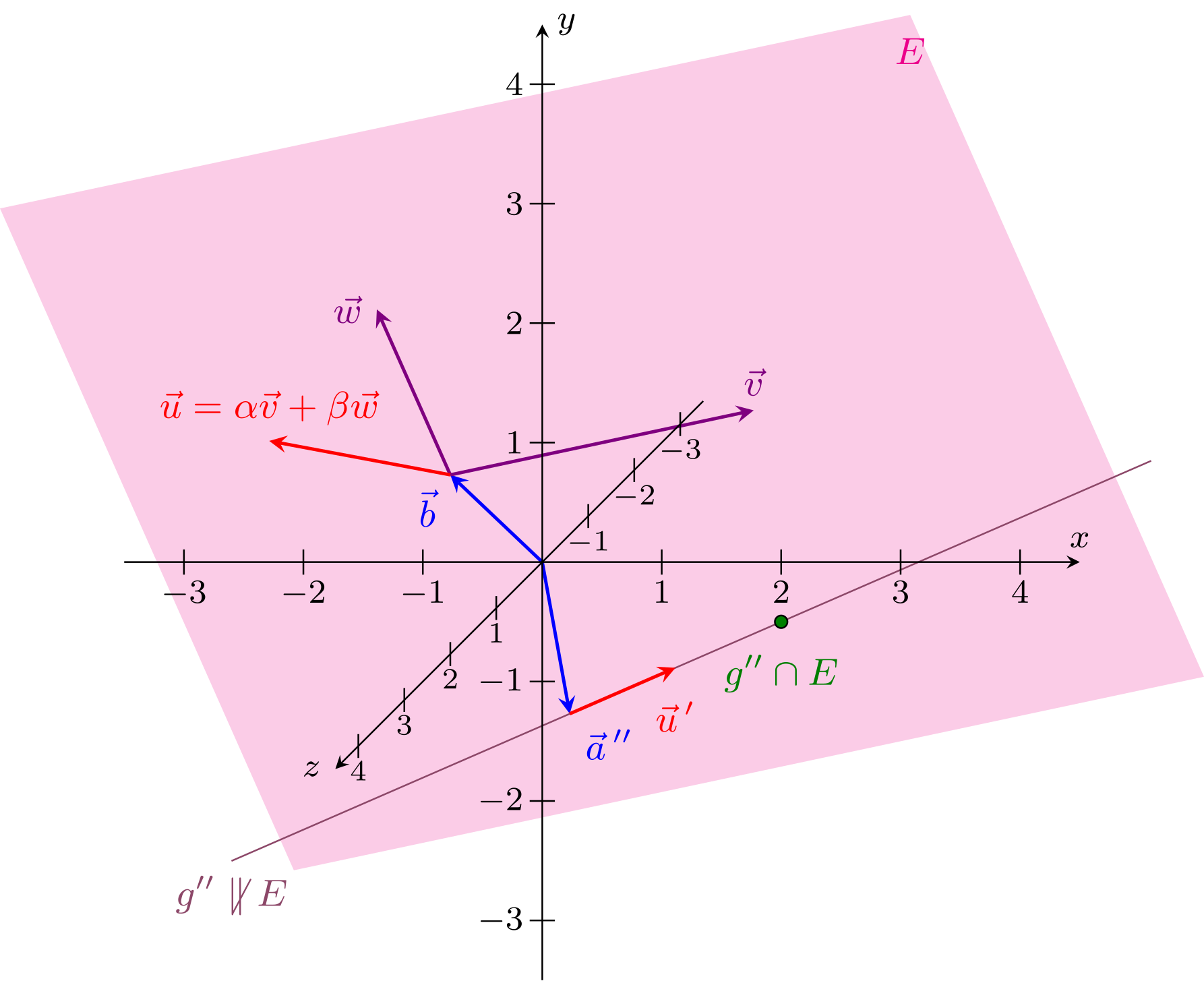
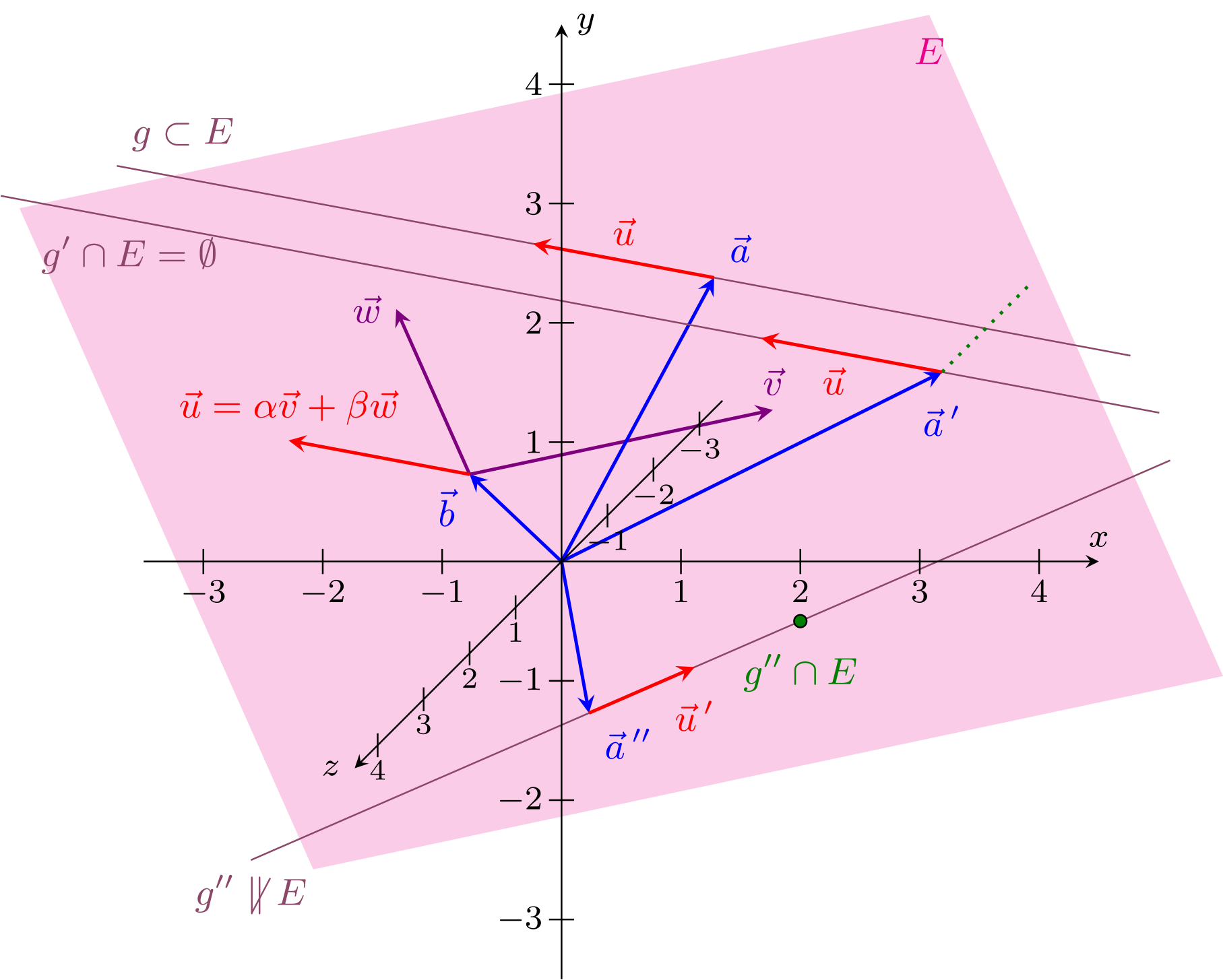
- Die Gerade liegt in der Ebene . Dies ist genau dann der Fall, wenn die drei Richtungsvektoren , und komplanar sind und der Aufpunkt der Geraden in der Ebene liegt.
- Die Gerade liegt parallel zur Ebene . Dies ist genau dann der Fall, wenn die drei Richtungsvektoren , und komplanar sind und der Aufpunkt der Geraden nicht in der Ebene liegt.
- Die Gerade und die Ebene schneiden sich. Dies ist genau dann der Fall, wenn die drei Richtungsvektoren , und nicht komplanar sind.
Hat man eine Gerade und eine Ebene gegeben und möchte man deren Lagebeziehung bestimmen, so überprüft man zunächst die drei Richtungsvektoren auf Komplanarität. Ist diese gegeben, so untersucht man den Aufpunkt der Geraden darauf hin, ob er in der Ebene enthalten ist. Dies legt letztlich einen der drei möglichen Fälle eindeutig fest. Falls sich Gerade und Ebene schneiden, kann man dann noch den Schnittpunkt berechnen. Das folgende Beispiel zeigt einige dafür benutzte Vorgehensweisen.
Beispiel
10.2.19
Gegeben ist eine Ebene in Parameterform durch
Gegeben ist eine Ebene in Parameterform durch
- Eine Gerade, die den Vektor als Richtungsvektor aufweist, liegt entweder in der Ebene oder ist zu dieser parallel, da zu den beiden Richtungsvektoren von komplanar ist. Man findet aus der Bedingung
die Zahlen und . Folglich liegt die Gerade
in der Ebene , denn der Aufpunkt liegt in , da man berechnet:
Der Ortsvektor der Geraden ergibt sich also für die Parameterwerte in der Ebene. Demhingegen ist die Gerade
parallel zu Ebene , denn weist als Aufpunkt den Ursprung auf. Der Ursprung liegt aber nicht in , denn für die Vektorgleichung
gibt es keine Parameterwerte und , die diese erfüllen. Die erste Komponente würde implizieren und die zweite Komponente ; ein Widerspruch.
- Jede Gerade mit einem Richtungsvektor, der nicht komplanar zu den beiden Richtungsvektoren und von ist, schneidet die Ebene in genau einem Punkt. Ein Beispiel einer solchen Geraden ist
Der Richtungsvektor ist nicht komplanar zu und , denn die Bedingung
ist durch keine Zahlen erfüllbar. Die erste Komponente würde und die zweite implizieren; ein Widerspruch. Nun kann durch Gleichsetzen der Ortsvektoren der Geraden und der Ebene der Schnittpunkt der beiden berechnet werden:
Interessiert man sich nur für den Schnittpunkt, so genügt es den Parameterwert der Geraden zu bestimmen, für den diese Vektorgleichung erfüllt ist. Der Ortsvektor des Schnittpunkts ergibt sich dann durch Einsetzen des bestimmten Parameterwerts in die Gerade. Die ersten beiden Komponenten dieser Vektorgleichung liefern zwei Gleichungen für die Unbekannten und :
woraus man erhält. Damit hat der Schnittpunkt den Ortsvektor
Aufgabe 10.2.20
Gegeben ist die Ebene
und die Gerade
deren Aufpunkt nicht in liegt.
Bestimmen Sie den fehlenden Eintrag , so dass parallel zu ist.
Berechnen Sie für alle anderen Werte von den Schnittpunkt in Abhängigkeit von . Geben Sie die drei Komponenten von getrennt an.
Gegeben ist die Ebene
und die Gerade
deren Aufpunkt nicht in liegt.
Bestimmen Sie den fehlenden Eintrag , so dass parallel zu ist.
Berechnen Sie für alle anderen Werte von den Schnittpunkt in Abhängigkeit von . Geben Sie die drei Komponenten von getrennt an.
Aufgabe 10.2.21
Gegeben ist die Gerade
Bestimmen Sie folgende Werte des Parameters :
Gegeben ist die Gerade
Bestimmen Sie folgende Werte des Parameters :
- Wert des Parameters für den die -Ebene schneidet:
- Wert des Parameters für den die -Ebene schneidet:
- Wert des Parameters für den die -Ebene schneidet:
Betrachtet man zwei Ebenen im Raum, so gibt es für ihre Lagebeziehung drei Fälle, die sich analog zu den drei möglichen relativen Lagen zweier Geraden in der Ebene aus Abschnitt 9.2.3 verhalten. Die folgende Infobox stellt diese Fälle zusammen.
Info
10.2.22
Gegeben sind zwei Ebenen mit dem Aufpunktvektor und den beiden Richtungsvektoren und sowie mit dem Aufpunktvektor und den beiden Richtungsvektoren und durch
und
Für die relative Lage von und gibt es genau drei Möglichkeiten:
Gegeben sind zwei Ebenen mit dem Aufpunktvektor und den beiden Richtungsvektoren und sowie mit dem Aufpunktvektor und den beiden Richtungsvektoren und durch
und
Für die relative Lage von und gibt es genau drei Möglichkeiten:
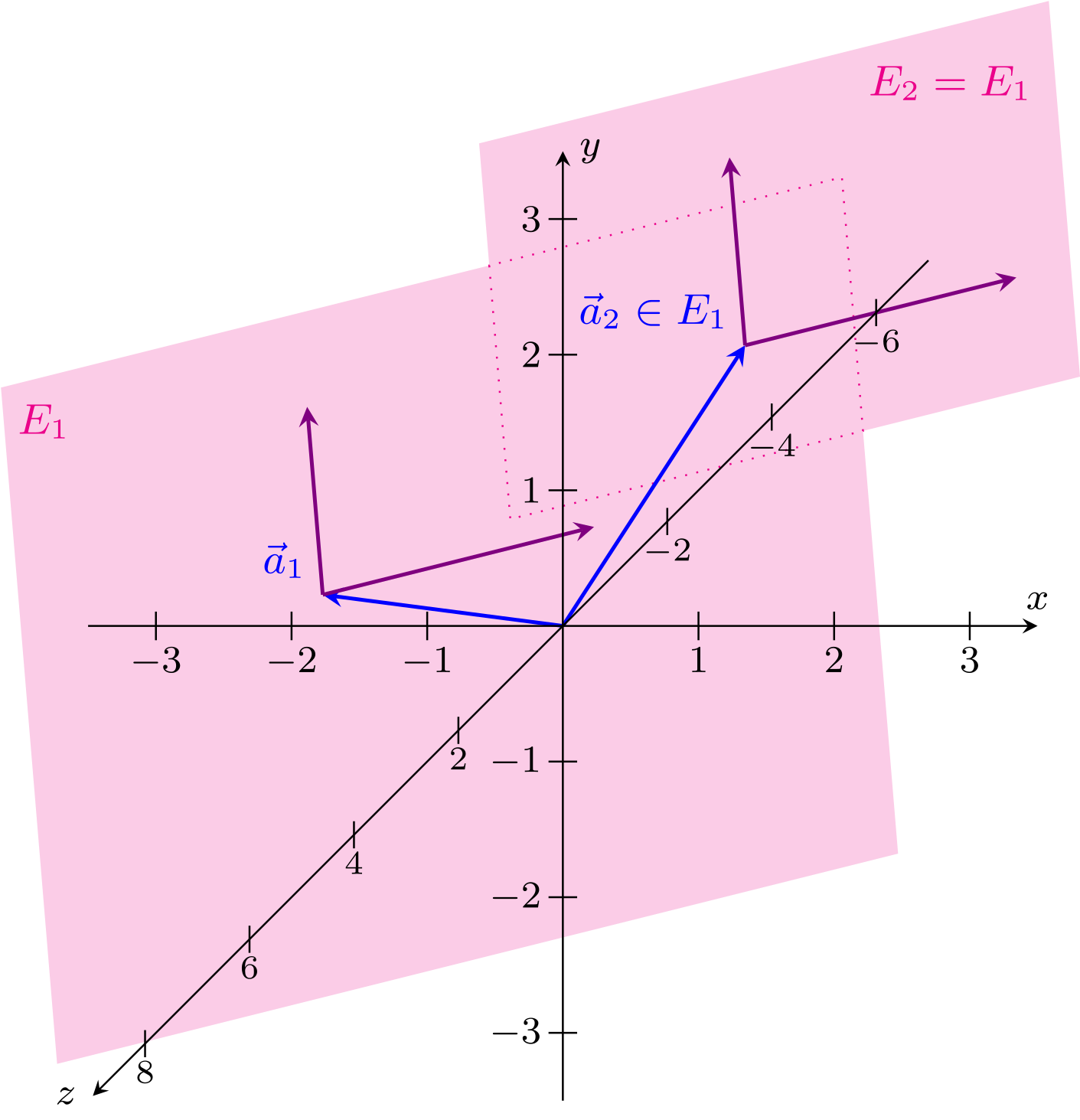
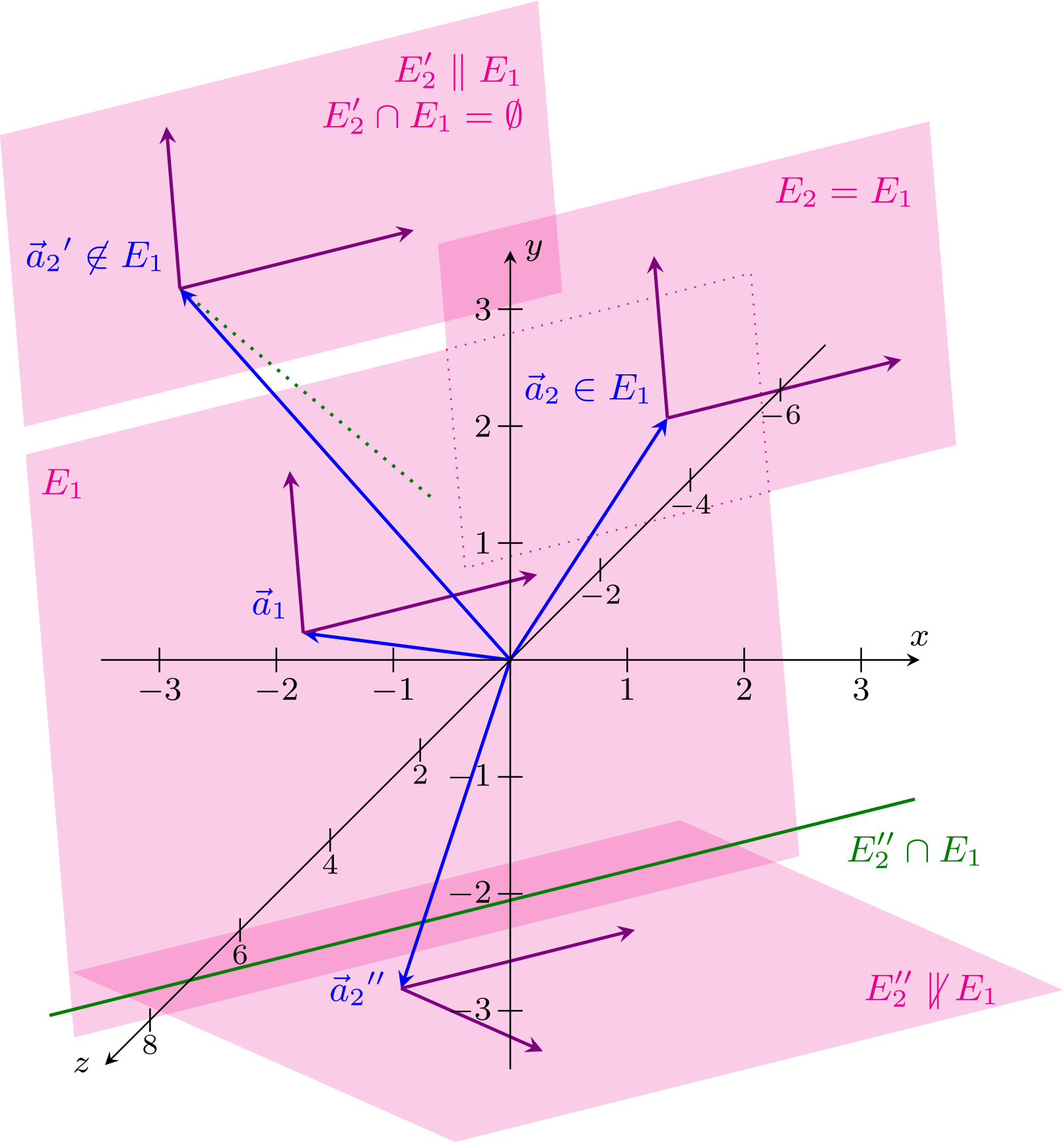
- Die Ebenen und sind identisch, falls sie alle Punkte gemeinsam haben. Dies ist genau dann der Fall, wenn die drei Richtungsvektoren , , sowie die drei Richtungsvektoren , , komplanar sind und der Aufpunkt von in enthalten ist.
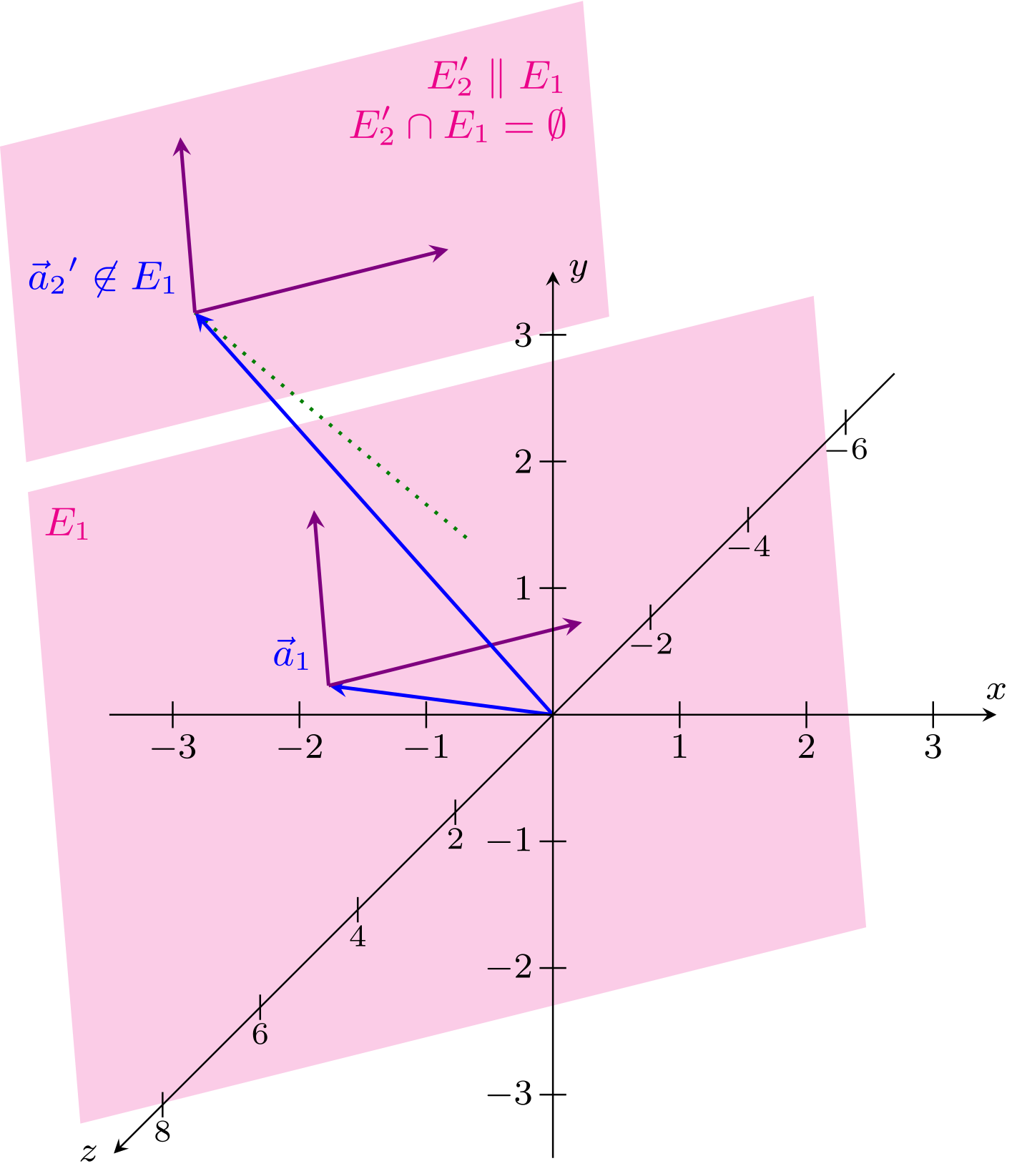
- Die Ebenen und sind parallel, falls sie keine Punkte gemeinsam haben. Dies ist genau dann der Fall, wenn die drei Richtungsvektoren , , sowie die drei Richtungsvektoren , , komplanar sind und der Aufpunkt von nicht in enthalten ist.
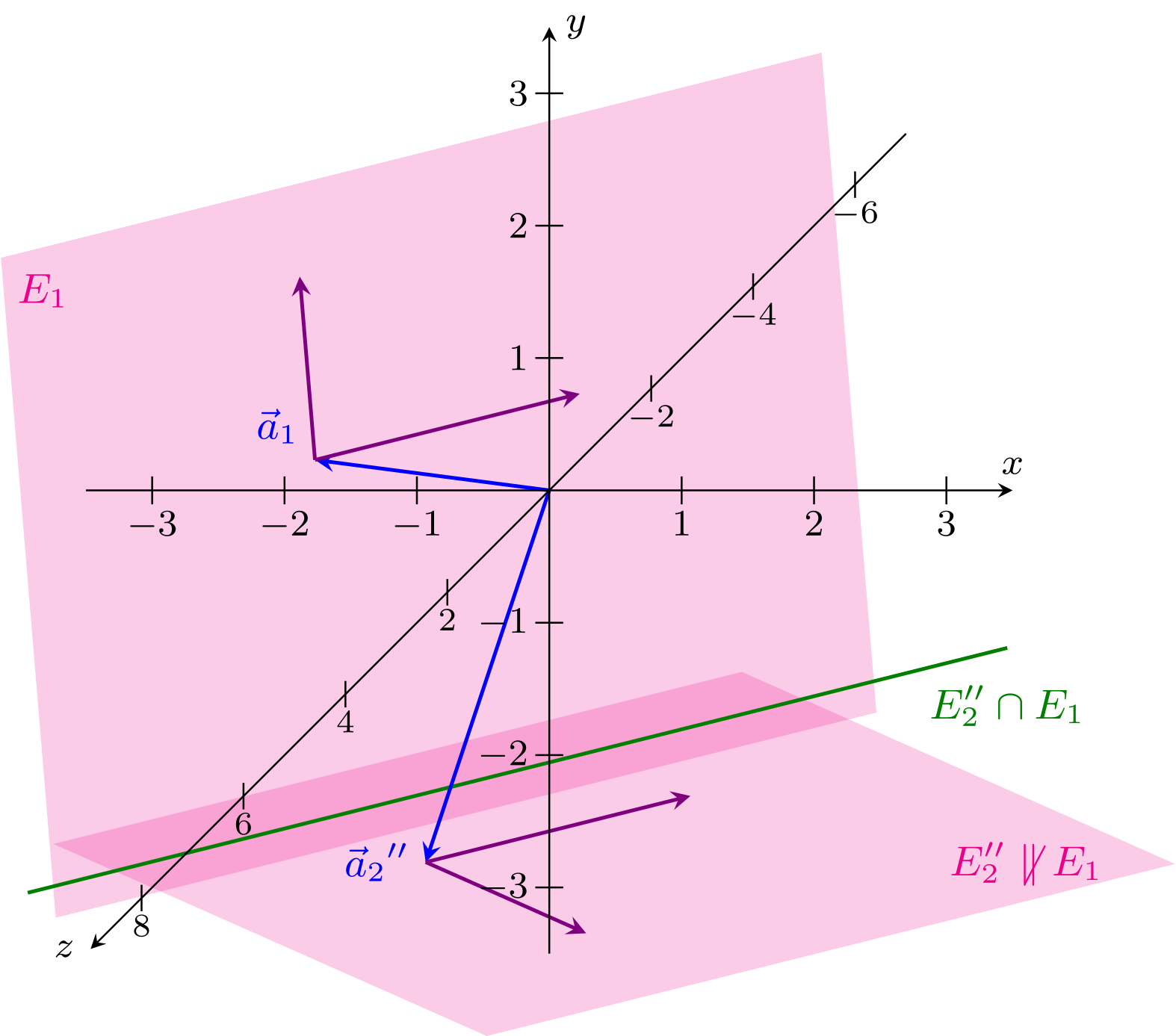
- Die Ebenen und schneiden sich, falls ihre gemeinsamen Punkte eine Gerade bilden. Dies ist genau dann der Fall, wenn die drei Richtungsvektoren , , oder die drei Richtungsvektoren , , nicht komplanar sind.
Natürlich sind in den Bedingungen für die drei Fälle, die in obiger Infobox angegeben sind, die Rollen der beiden Ebenen auch vertauschbar; man kann also beispielsweise auch überprüfen, ob der Aufpunkt von in enthalten ist; dies macht keinen Unterschied. Falls die Ebenen sich schneiden, kann die Schnittgerade berechnet werden. Schnittmengen von Ebenen wurden bereits in Abschnitt 4.3 im Rahmen der geometrischen Interpretation der Lösbarkeit linearer Gleichungssysteme mit drei Unbekannten behandelt. Die Vertrautheit mit diesem Abschnitt wird im Folgenden vorausgesetzt und dessen kurze Wiederholung wird wärmstens empfohlen. Das folgende Beispiel zeigt die Vorgehensweise bei der Untersuchung der relativen Lage zweier Ebenen.
Beispiel
10.2.23
Gegeben sind die drei Ebenen
und
Gegeben sind die drei Ebenen
und
- Die Ebenen und sind parallel. Die Richtungsvektoren und von und der erste Richtungsvektor von sind komplanar, denn die Bedingung
ist durch die Zahlen erfüllt. Genauso sind die Richtungsvektoren und von und der zweite Richtungsvektor von sind komplanar, denn die Bedingung
ist durch die Zahlen und erfüllt. Weiterhin ist der Aufpunkt von nicht in enthalten, denn die Bedingung
ist für keine Parameterwerte und erfüllbar. Aus der zweiten Komponente würde folgen, was eingesetzt in die erste Komponente auf führt. Dies ergibt aber in der dritten Komponente den Widerspruch . Würde man allerdings in einen anderen Aufpunkt wählen, der in enthalten ist, zum Beispiel den gleichen Aufpunkt wie in , so würde man eine zu identische Ebene erhalten, also eine andere Parameterdarstellung der gleichen Ebene. Zum Beispiel ist
eine solche Ebene.
- Die Ebenen und schneiden sich. Beide Richtungsvektoren und von sind nicht komplanar zu den beiden Richtungsvektoren und von . Zum Beispiel gilt für den zweiten Richtungsvektor von , dass die Bedingung
durch keine Zahlen und erfüllbar ist. Die ersten beiden Komponenten würden erzwingen, was der dritten Komponente widerspricht. Die Schnittgerade der beiden Ebenen berechnet man durch Gleichsetzen der Ortsvektoren. Man erhält hier:
Diese Vektorgleichung entspricht einem System von drei linearen Gleichungen mit den vier Unbekannten , , und . Dies wird nun mit den Methoden aus Abschnitt 4.4 gelöst, indem man eine der Unbekannten als Parameter auffasst und die anderen Unbekannten in Abhängigkeit von diesem berechnet. Dieser übrige Parameter wird am Ende der Parameter in der Punkt-Richtungsform der zu bestimmenden Schnittgeraden werden. Welche der Unbekannten man als Parameter auffasst, ist egal. Hier wird nun als Parameter benutzt. Dann führen die ersten beiden Komponenten der Vektorgleichung auf die beiden Gleichungen
aus denen man und berechnet. Dies in die dritte Komponente eingesetzt ergibt
Nun kann oder und in die Ebene oder eingesetzt werden; dies führt - bei gleicher Parameterwahl - auf dieselbe Parameterdarstellung der Geraden , nämlich der Schnittgeraden der beiden Ebenen. Für das Einsetzen in ergibt sich:
Aufgabe 10.2.24
Gegeben sind die beiden Ebenen
und
wobei der Aufpunkt von nicht in liegt.
Bestimmen Sie die fehlenden Komponenten und von , so dass und parallel sind.
Gegeben sind die beiden Ebenen
und
wobei der Aufpunkt von nicht in liegt.
Bestimmen Sie die fehlenden Komponenten und von , so dass und parallel sind.
Aufgabe 10.2.25
Gegeben sind die beiden Ebenen
und
welche sich schneiden und die Schnittgerade
besitzen.
Bestimmen Sie die fehlenden Komponenten und des Richtungsvektors der Schnittgerade.
Gegeben sind die beiden Ebenen
und
welche sich schneiden und die Schnittgerade
besitzen.
Bestimmen Sie die fehlenden Komponenten und des Richtungsvektors der Schnittgerade.