

10.1.3 Vektoren in der Ebene und im Raum
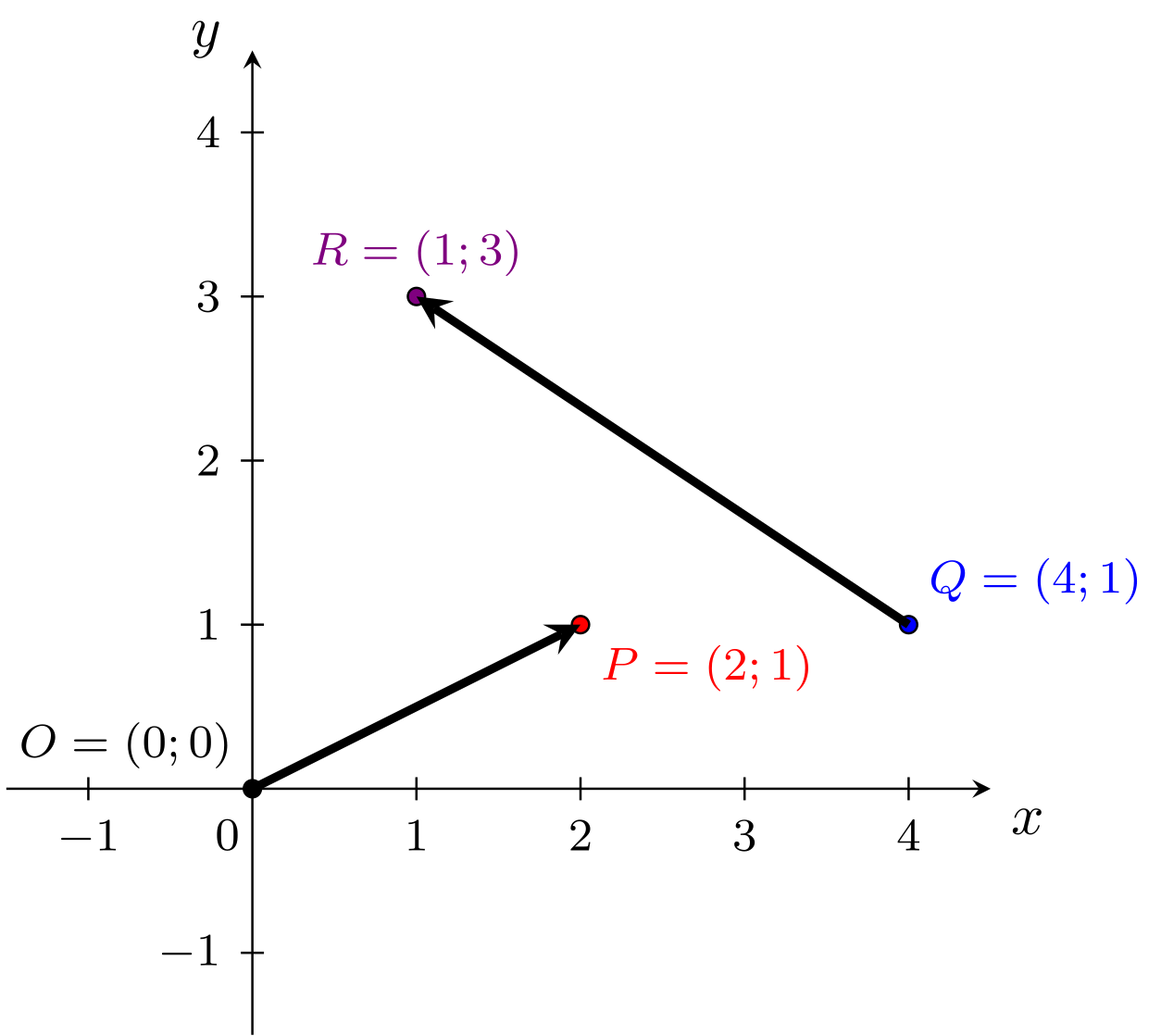
Punkte in der Ebene und im Raum, die als Koordinatenpaare oder -tripel bezüglich eines vorgegebenen Koordinatensystems gegeben sind, können durch Strecken verbunden werden. Gibt man diesen Strecken zusätzlich eine Orientierung (d.h. legt man einen der Punkte als Fußpunkt und einen der Punkte als Spitze fest), so erhält man Pfeile, die von einem Punkt zum anderen zeigen:
Im Sinne dieser Abbildungen kann man den Informationsgehalt eines Pfeils folgendermaßen charakterisieren: Ein Pfeil gibt an, wie man von einem Punkt (am Fußpunkt des Pfeils) zu einem anderen Punkt (an der Spitze des Pfeils) gelangt. So gibt der Pfeil, welcher im zweidimensionalen Fall mit verbindet, wieder, dass man von aus um Längeneinheiten nach links und um Längeneinheiten nach oben gehen muss, um zu erreichen. Oder in einer mathematischeren Sprechweise: Man gehe von aus um in -Richtung und um in -Richtung. Für den Pfeil, der im zweidimensionalen Fall den Ursprung mit dem Punkt verbindet, ist dies sogar noch einfacher, denn um von nach zu gelangen, geht man einfach um in -Richtung und um in -Richtung. Diese Werte entsprechen natürlich genau den Koordinaten des Punktes .
Im Sinne dieser Abbildungen kann man den Informationsgehalt eines Pfeils folgendermaßen charakterisieren: Ein Pfeil gibt an, wie man von einem Punkt (am Fußpunkt des Pfeils) zu einem anderen Punkt (an der Spitze des Pfeils) gelangt. So gibt der Pfeil, welcher im zweidimensionalen Fall mit verbindet, wieder, dass man von aus um Längeneinheiten nach links und um Längeneinheiten nach oben gehen muss, um zu erreichen. Oder in einer mathematischeren Sprechweise: Man gehe von aus um in -Richtung und um in -Richtung. Für den Pfeil, der im zweidimensionalen Fall den Ursprung mit dem Punkt verbindet, ist dies sogar noch einfacher, denn um von nach zu gelangen, geht man einfach um in -Richtung und um in -Richtung. Diese Werte entsprechen natürlich genau den Koordinaten des Punktes .
Aufgabe 10.1.3
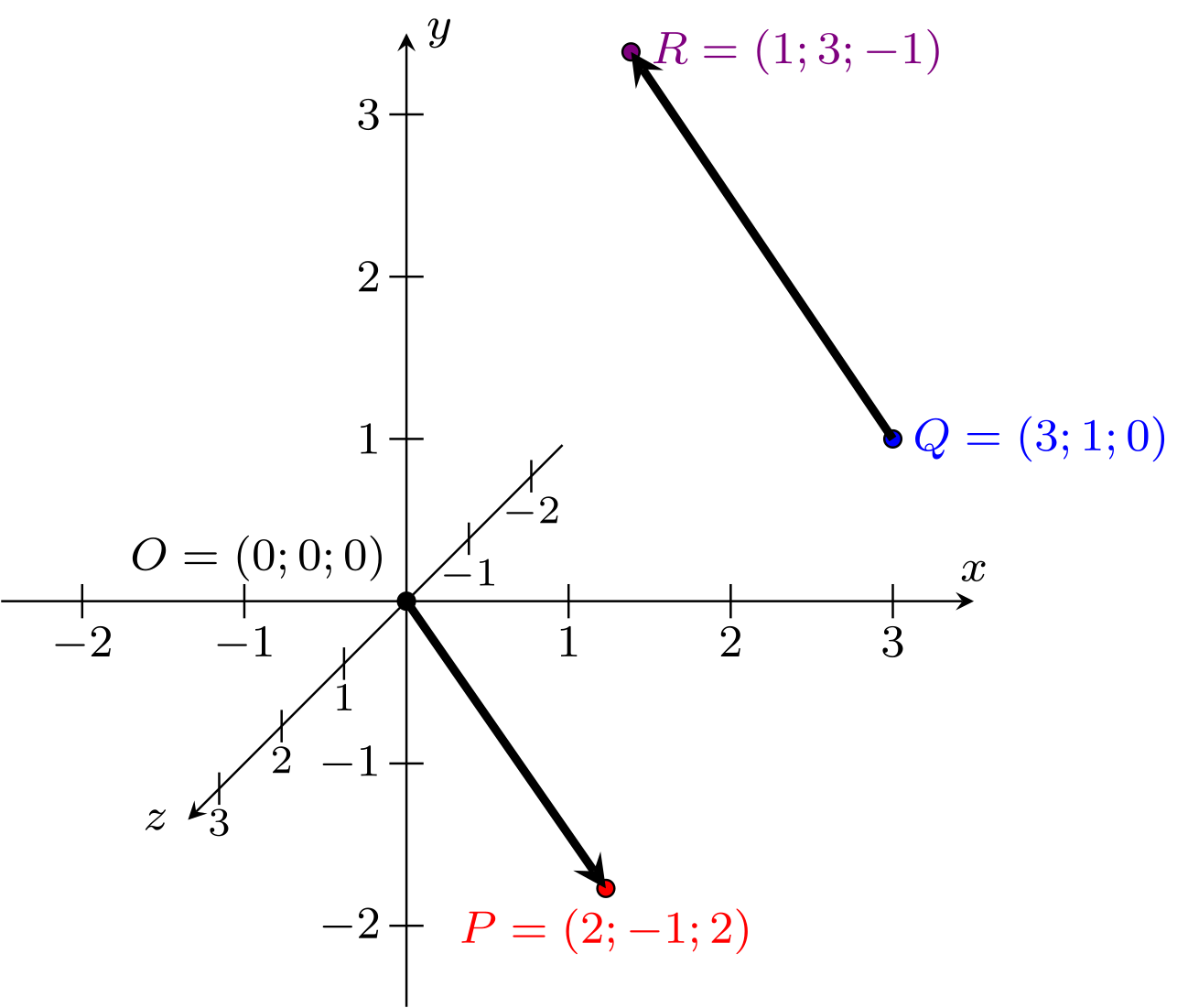
Bestimmen Sie für die Pfeile in der obigen dreidimensionalen Abbildung die (vorzeichenbehafteten) Bewegungen in die drei Koordinatenrichtungen, die nötig sind, um vom Fußpunkt zur Spitze des jeweiligen Pfeils zu gelangen. Gehen Sie analog zu den oben stehenden Erläuterungen im zweidimensionalen Fall vor.
Bestimmen Sie für die Pfeile in der obigen dreidimensionalen Abbildung die (vorzeichenbehafteten) Bewegungen in die drei Koordinatenrichtungen, die nötig sind, um vom Fußpunkt zur Spitze des jeweiligen Pfeils zu gelangen. Gehen Sie analog zu den oben stehenden Erläuterungen im zweidimensionalen Fall vor.
- Für den Pfeil von nach :
- in -Richtung:
 ,
,
- in -Richtung:
,
- in -Richtung:
.
- in -Richtung:
- Für den Pfeil von nach :
- in -Richtung:
,
- in -Richtung:
,
- in -Richtung:
.
- in -Richtung:
Nun ist ersichtlich, dass auch im Fall der Pfeile, die jeweils mit verbinden, die Bewegungen in die jeweiligen Koordinatenrichtungen durch die Koordinaten der Punkte an Fußpunkt und Spitze der Pfeile bestimmt werden. Es gilt offenbar im zweidimensionalen Fall:
und im dreidimensionalen Fall:
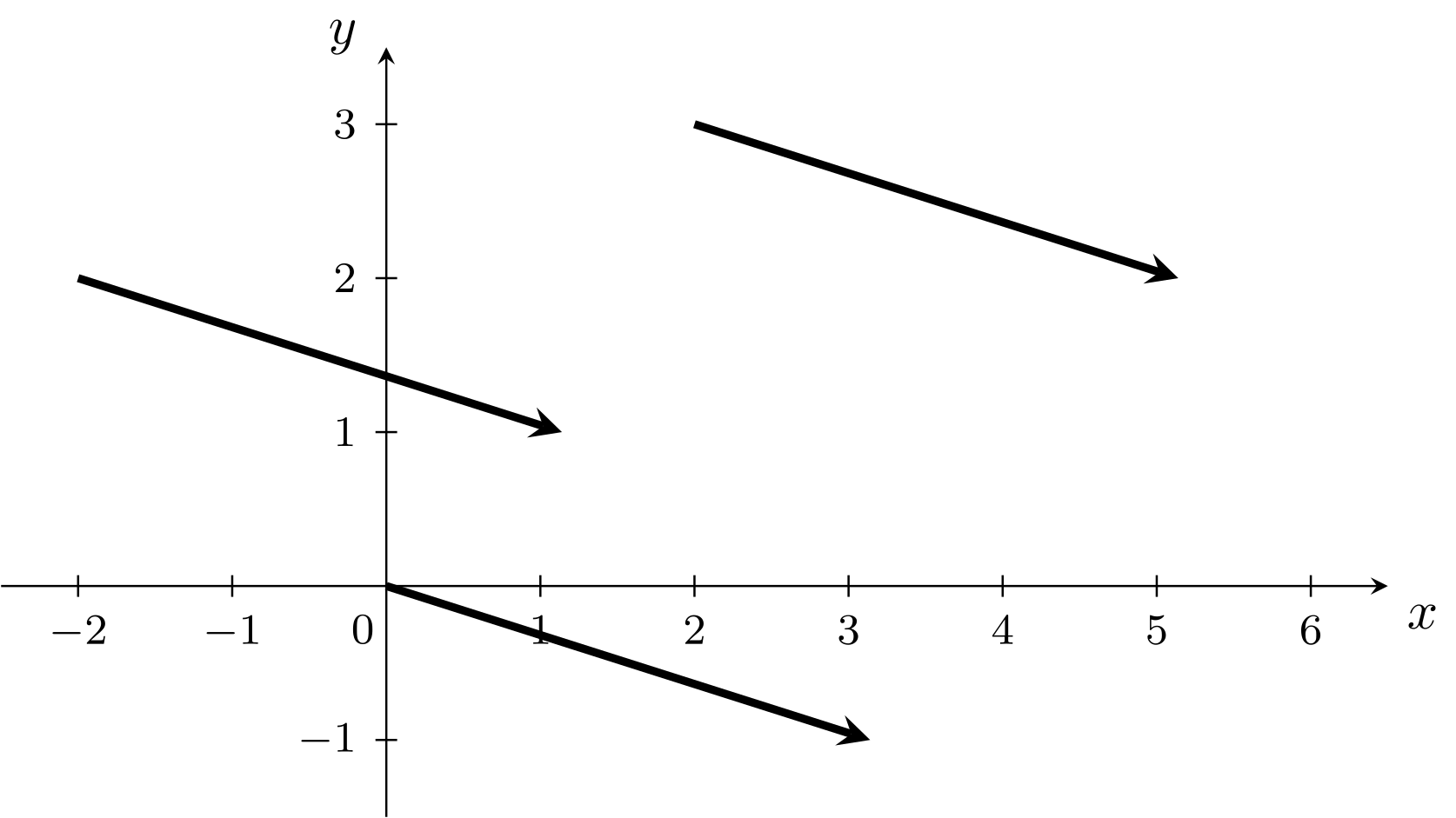
Die Bewegungen in die verschiedenen Koordinatenrichtungen ergeben sich also als die Differenzen der Koordinaten des Punkts an der Spitze des Pfeils und des Punkts am Fußpunkt des Pfeils. Dies bedeutet aber, dass sich alle Pfeile, welche Punktepaare miteinander verbinden, für die sich jeweils gleiche Koordinatendifferenzen ergeben, nur durch eine Parallelverschiebung - unter Beibehaltung ihrer Orientierung - unterscheiden. Die Punktepaare und , und sowie und im folgenden zweidimensionalen Bild werden jeweils durch Pfeile verbunden, die durch Parallelverschiebung zur Deckung gebracht werden können:
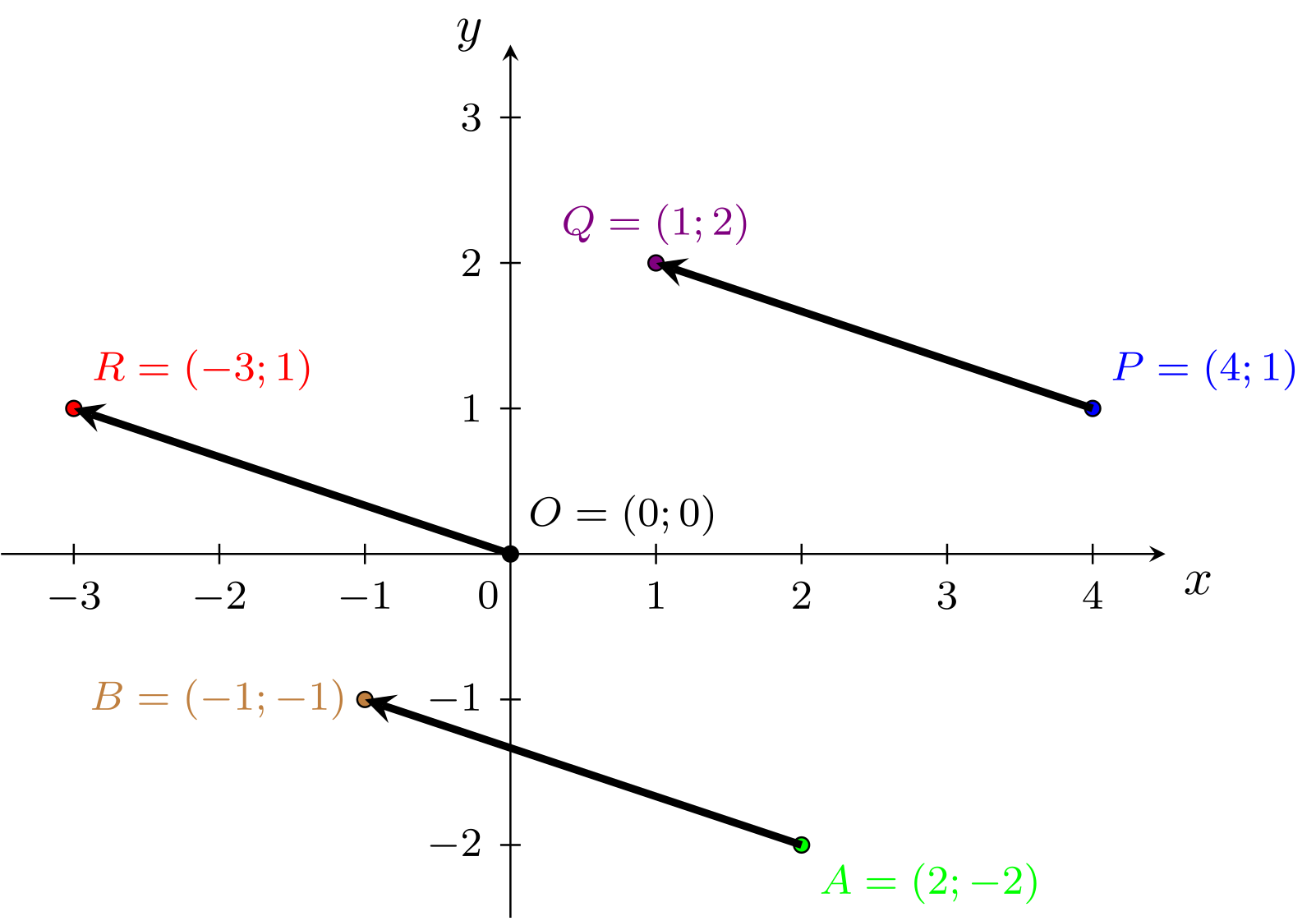
Abbildung 10.1.7: Skizze (C)
Man kann hier natürlich noch beliebig viele weitere Punktepaare finden, die durch einen ebensolchen Pfeil verbunden werden, und das Ganze funktioniert selbstverständlich analog auch im dreidimensionalen Fall.
Jeder Pfeil in der obigen Abbildung gibt also den gleichen Informationsgehalt, nämlich in -Richtung und in -Richtung, wieder. Was liegt also mathematisch näher, als jeden dieser Pfeile nur als Vertreter (einen sogenannten Repräsentanten) eines viel grundlegenderen Objekts aufzufassen? Dieses grundlegendere mathematische Objekt heißt Vektor und hat in diesem Fall die Komponenten (-Komponente) und (-Komponente), welche als sogenanntes -Tupel übereinander geschrieben werden:
Die folgende Infobox fasst diese Erkenntnis und noch einige weitere Schreib- und Sprechweisen zu Vektoren zusammen.
Info
10.1.4
Ein zwei- bzw. dreidimensionaler Vektor ist ein - bzw. -Tupel mit bzw. Komponenten, die als -, - (und -)Komponenten bezeichnet werden. Als Variablen für Vektoren werden für gewöhnlich Kleinbuchstaben mit Pfeil benutzt. Als Variable für ihre Komponenten wird oft der gleiche Kleinbuchstabe mit der zugehörigen Koordinatenrichtung als Index zur Unterscheidung verwendet:
Ein Pfeil in der Ebene oder im Raum heißt Repräsentant des Vektors, wenn der Pfeil zwei Punkte in der Ebene oder im Raum verbindet, die so liegen, dass die Differenzen der Koordinaten des Punkts an der Spitze des Pfeils und des Punkts am Fußpunkt des Pfeils genau die Komponenten des Vektors ergeben.
Ein zwei- bzw. dreidimensionaler Vektor ist ein - bzw. -Tupel mit bzw. Komponenten, die als -, - (und -)Komponenten bezeichnet werden. Als Variablen für Vektoren werden für gewöhnlich Kleinbuchstaben mit Pfeil benutzt. Als Variable für ihre Komponenten wird oft der gleiche Kleinbuchstabe mit der zugehörigen Koordinatenrichtung als Index zur Unterscheidung verwendet:
Ein Pfeil in der Ebene oder im Raum heißt Repräsentant des Vektors, wenn der Pfeil zwei Punkte in der Ebene oder im Raum verbindet, die so liegen, dass die Differenzen der Koordinaten des Punkts an der Spitze des Pfeils und des Punkts am Fußpunkt des Pfeils genau die Komponenten des Vektors ergeben.
Oft ist man in der Situation, dass man einen Punkt in der Ebene oder im Raum bzw. zwei Punkte und in der Ebene oder im Raum gegeben hat, und man möchte nun den Vektor angeben, von welchem der Pfeil vom Ursprung zu dem gegebenen Punkt bzw. von welchem der Pfeil, der mit verbindet, jeweils ein Repräsentant ist. Die dafür benutzte Schreib- und Sprechweise sowie die nötige Rechenoperation gibt die folgende Infobox wieder:
Info
10.1.5
- Zweidimensionaler Fall:
Sind sowie und Punkte in der Ebene, so heißt der Vektor
Verbindungsvektor vom Punkt zum Punkt und
Ortsvektor des Punkts . Dies sind genau diejenigen Vektoren, welche als Repräsentanten unter anderem die entsprechenden Verbindungspfeile der Punkte besitzen: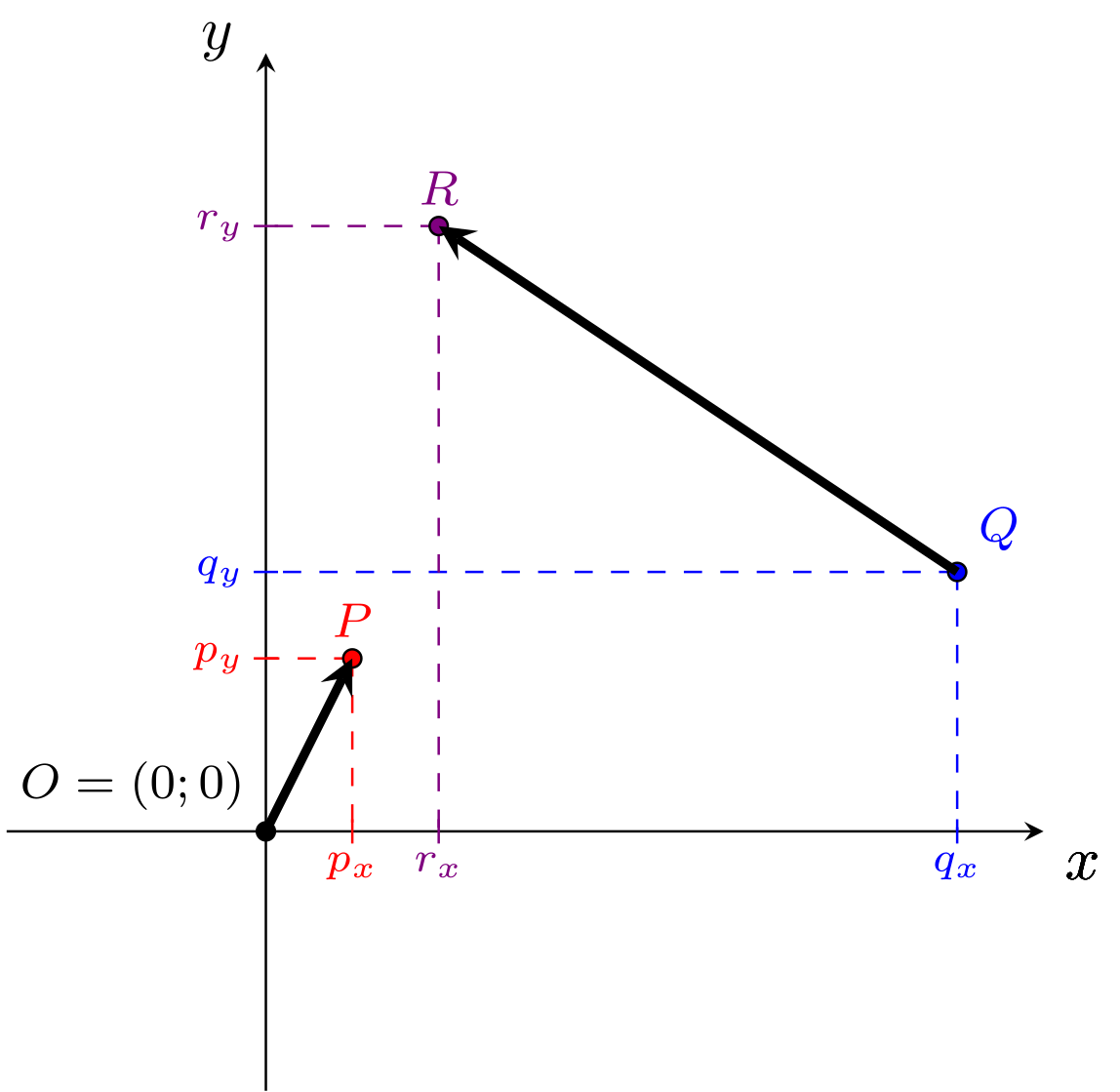 Abbildung 10.1.8: Skizze (C)
Abbildung 10.1.8: Skizze (C)
- Dreidimensionaler Fall:
Sind sowie und Punkte im Raum, so heißt der Vektor
Verbindungsvektor vom Punkt zum Punkt und
Ortsvektor des Punkts . Dies sind genau diejenigen Vektoren, welche als Repräsentanten unter anderem die entsprechenden Verbindungspfeile der Punkte besitzen: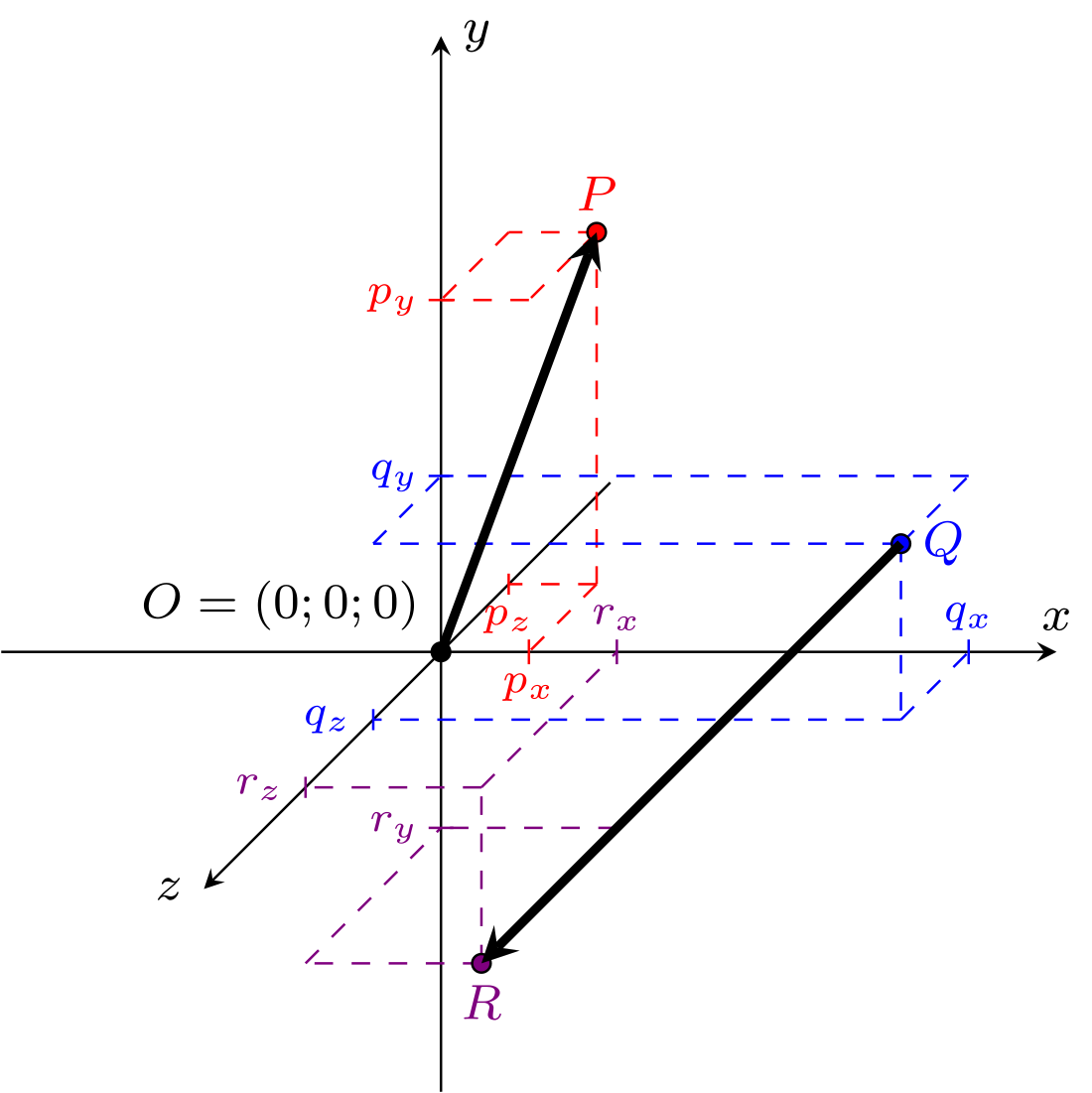 Abbildung 10.1.9: Skizze (C)
Abbildung 10.1.9: Skizze (C)
Beispiel
10.1.6
- Zweidimensionaler Fall:
Der Punkt besitzt den Ortsvektor
Der Vektor
ist zum Beispiel Verbindungsvektor vom Punkt zum Punkt , also gilt
Allerdings ist , denn
- Dreidimensionaler Fall:
Zu den beiden Punkten und ist der Verbindungsvektor von nach :
Aber der Verbindungsvektor von nach ist
Der Vektor
ist natürlich gleichzeitig auch Ortsvektor des Punktes .
Das obige Beispiel zeigt bereits folgende interessante Tatsache: Dreht man die Orientierung eines Vektors (und damit die Orientierung aller Pfeile, die ihn repräsentieren) um, so erhält man einen Vektor, in dem die Komponenten das entgegengesetzte Vorzeichen besitzen. Man spricht hier auch vom sogenannten Gegenvektor. Dies ist ein erster Hinweis darauf, dass man mit Vektoren komponentenweise rechnen kann. Dies wird ausführlich im nachfolgenden Abschnitt 10.1.4 behandelt.
Außerdem gibt es offenbar im zwei- und im dreidimensionalen Fall jeweils einen Vektor, dessen Komponenten alle gleich sind:
Dieser Vektor wird jeweils als zwei- bzw. dreidimensionaler Nullvektor bezeichnet. Man kann sich vorstellen, dass seine Repräsentanten „Pfeile der Länge “ sind, also solche die einen Punkt mit sich selbst verbinden. Oder anders gesagt: Der Nullvektor ist der Ortsvektor des Ursprungs.
Aufgabe 10.1.7
Gegeben sind die Punkte
in der Ebene, die Punkte
im Raum sowie die zwei- bzw. dreidimensionalen Vektoren
Gegeben sind die Punkte
in der Ebene, die Punkte
im Raum sowie die zwei- bzw. dreidimensionalen Vektoren
- Bestimmen Sie die folgenden Vektoren:
-
- Bestimmen Sie Punkte in der Ebene und im Raum, so dass folgende Aussagen wahr sind:
-
- Zeichnen Sie mindestens drei Repräsentanten des Vektors .
Die vorhergehende Einführung des Vektorkonzepts zeigt die nahe Verwandtschaft von Vektoren und Punkten. Tatsächlich gibt es sogar eine Eins-zu-eins-Korrespondenz zwischen Punkten und Ortsvektoren: Zu jedem Punkt gibt es genau einen Vektor, der Ortsvektor dieses Punktes ist, und umgekehrt gibt es zu jedem Vektor genau einen Punkt, für den dieser Vektor der zugehörige Ortsvektor ist. Dies gilt im zwei- sowie im dreidimensionalen Fall. Das rechtfertigt nun die - in den folgenden Abschnitten oft benutzte - Konvention, Punkte durch ihre Ortsvektoren zu beschreiben. So beschreibt man zum Beispiel einen Punkt statt durch seine Koordinaten oft durch seinen zugehörigen Ortsvektor . Dies bringt bei der Untersuchung geometrischer Objekte wie Geraden oder Ebenen (insbesondere im dreidimensionalen Fall) dann auch gewisse Vorteile in der Beschreibung mit sich (vgl. z.B. Abschnitt 10.2.2).
Weiterhin rechtfertigt die Eins-zu-eins-Korrespondenz zwischen Punkten und Ortsvektoren auch, die Abkürzungen und nicht nur für die Menge aller Punkte in der Ebene bzw. im Raum zu verwenden, sondern auch für die Menge aller zwei- bzw. dreidimensionaler Vektoren. Davon wird in den nächsten Abschnitten ebenfalls Gebrauch gemacht.