
2.1.2 Elektromagnetismus
Dies ist ein einreichbarer Test.- Im Gegensatz zu den offenen Aufgaben werden beim Eingeben keine Hinweise zur Formulierung der mathematischen Ausdrücke gegeben.
- Der Test kann jederzeit neu gestartet oder verlassen werden.
- Der Test kann durch die Buttons am Ende der Seite beendet und abgeschickt, oder zurückgesetzt werden.
- Der Test kann mehrfach probiert werden. Für die Statistik zählt die zuletzt abgeschickte Version.
Aufgabe 2.1.17
An einem -Anschluss wird ein Staubsauger mit einer Leistung von betrieben. Der Staubsauger wird eine halbe Stunde betrieben. Die Kilowattstunde kostet . Welche Kosten sind entstanden?
Antwort:
An einem -Anschluss wird ein Staubsauger mit einer Leistung von betrieben. Der Staubsauger wird eine halbe Stunde betrieben. Die Kilowattstunde kostet . Welche Kosten sind entstanden?
Antwort:
Aufgabe 2.1.18
Ordnen Sie den Formeln für den Gesamtwiderstand die jeweils richtige Schaltung der Widerstände und zu.
Wählen Sie die richtigen Antworten aus.
Ordnen Sie den Formeln für den Gesamtwiderstand die jeweils richtige Schaltung der Widerstände und zu.
Wählen Sie die richtigen Antworten aus.
| Formel | Schaltung |
Aufgabe 2.1.19
Anna hat einen nicht-magnetischen großen Nagel an den Südpol eines Dauermagneten gehalten und stellt nun fest, dass dieser Nagel andere, kleinere Nägel ebenfalls wie ein Magnet anzieht. Wie kann sie den Nagel wieder entmagnetisieren?
Wählen Sie eine oder mehrere Antworten:
Anna hat einen nicht-magnetischen großen Nagel an den Südpol eines Dauermagneten gehalten und stellt nun fest, dass dieser Nagel andere, kleinere Nägel ebenfalls wie ein Magnet anzieht. Wie kann sie den Nagel wieder entmagnetisieren?
Wählen Sie eine oder mehrere Antworten:
| A. Sie hält den Nagel an den Nordpol des Dauermagneten |
Richtig
|
| B. Sie lässt den Nagel auf den Steinboden fallen |
Richtig
|
| C. Sie erhitzt den Nagel, z.B. mit einem Feuerzeug |
Richtig
|
| D. Durch den Kontakt mit dem Dauermagneten wurde der Nagel für immer magnetisch |
Richtig
|
Aufgabe 2.1.20
An einer Steckdose mit der Spannung und unterschiedlicher Absicherung soll eine Pumpe mit einer Leistung von betrieben werden. Welche der drei Steckdosen können verwendet werden?
Wählen Sie eine Antwort:
An einer Steckdose mit der Spannung und unterschiedlicher Absicherung soll eine Pumpe mit einer Leistung von betrieben werden. Welche der drei Steckdosen können verwendet werden?
Wählen Sie eine Antwort:
| Steckdose 1 mit Absicherung | |
| Steckdose 2 mit Absicherung | |
| Steckdose 3 mit Absicherung |
Aufgabe 2.1.21
Markieren Sie alle Messgeräte, mit denen man (ohne weitere Hilfsmittel wie z.B. Widerstände) elektrische Spannungen messen kann!
Wählen Sie eine oder mehrere Antworten:
Markieren Sie alle Messgeräte, mit denen man (ohne weitere Hilfsmittel wie z.B. Widerstände) elektrische Spannungen messen kann!
Wählen Sie eine oder mehrere Antworten:
| Amperemeter |
Richtig
|
| Potentiometer |
Richtig
|
| Wattmeter |
Richtig
|
| Voltmeter |
Richtig
|
| Multimeter |
Richtig
|
| Oszilloskop |
Richtig
|
Aufgabe 2.1.22
Die Nennkapazität eines Akkumulators ist mit angegeben. Gehen Sie davon aus, dass der Akkumulator an einem USB-Port mit und einer konstanten Stromstärke von geladen wird. Wie lange dauert der Ladevorgang, wenn die gesamte angegebene Ladung zugrunde gelegt wird? Geben Sie die Zeitdauer an.
Antwort:
Die Nennkapazität eines Akkumulators ist mit angegeben. Gehen Sie davon aus, dass der Akkumulator an einem USB-Port mit und einer konstanten Stromstärke von geladen wird. Wie lange dauert der Ladevorgang, wenn die gesamte angegebene Ladung zugrunde gelegt wird? Geben Sie die Zeitdauer an.
Antwort:
Aufgabe 2.1.23
Welchen Widerstand müsste man an die Stelle von einsetzen, damit der Gesamtwiderstand der Schaltung beträgt?

Antwort:
Welchen Widerstand müsste man an die Stelle von einsetzen, damit der Gesamtwiderstand der Schaltung beträgt?
Abbildung 2.1.9: Schaltung aus Widerständen (C)
Antwort:
Aufgabe 2.1.24
Man nimmt ein Funktions-T-Shirt (hoher Nylon-Anteil) aus dem Wäschetrockner und will es sofort anziehen, doch das gestaltet sich schwierig. Das T-Shirt scheint zu kleben und lässt sich nur sehr schwer überstreifen. Was ist passiert?
Wählen Sie eine Antwort:
Man nimmt ein Funktions-T-Shirt (hoher Nylon-Anteil) aus dem Wäschetrockner und will es sofort anziehen, doch das gestaltet sich schwierig. Das T-Shirt scheint zu kleben und lässt sich nur sehr schwer überstreifen. Was ist passiert?
Wählen Sie eine Antwort:
| Der Wäschetrockner setzt die nasse Wäsche unter Spannung und verdrängt damit die Feuchtigkeit. Das geladene T-Shirt bleibt deshalb hängen. | |
| Wäsche muss erst mit einer Leistung von mindestens gebügelt werden, auch wenn sie im Wäschetrockner war, damit man sie problemlos anziehen kann. | |
| Da der Wäschetrockner nur mit Strom läuft, ist ein Teil des Stroms auf das T-Shirt übergegangen. Der Trockner ist höchstwahrscheinlich defekt, da es ein Stromleck gibt, das direkt in die Wäsche geht. | |
| Beim Reiben an der Trommelwand des Trockners fand eine teilweise Ladungstrennung statt, weshalb das T-Shirt nicht mehr elektrisch neutral ist. Da Kunstfaser ein Isolator ist, kann diese Ladung nicht einfach abfließen und sorgt so für den Klebeeffekt. |
Aufgabe 2.1.25
Nach dem Stromwärmegesetz (Erstes Joulesches Gesetz) gilt der folgende Zusammenhang zwischen der Wärmemenge und der durch den Leiter mit dem Widerstand fließenden Stromstärke sowie der Zeit , in der Strom fließt:
Überlegen Sie anhand der gegebenen Formel, welche Voraussetzungen für ein elektrisches Schweißgerät ideal sind:
ist wichtiger als .
Nach dem Stromwärmegesetz (Erstes Joulesches Gesetz) gilt der folgende Zusammenhang zwischen der Wärmemenge und der durch den Leiter mit dem Widerstand fließenden Stromstärke sowie der Zeit , in der Strom fließt:
Überlegen Sie anhand der gegebenen Formel, welche Voraussetzungen für ein elektrisches Schweißgerät ideal sind:
ist wichtiger als .
Aufgabe 2.1.26
Welche Lampe in dem gezeigten Stromkreis muss man herausdrehen, damit keine einzige Lampe mehr leuchtet?
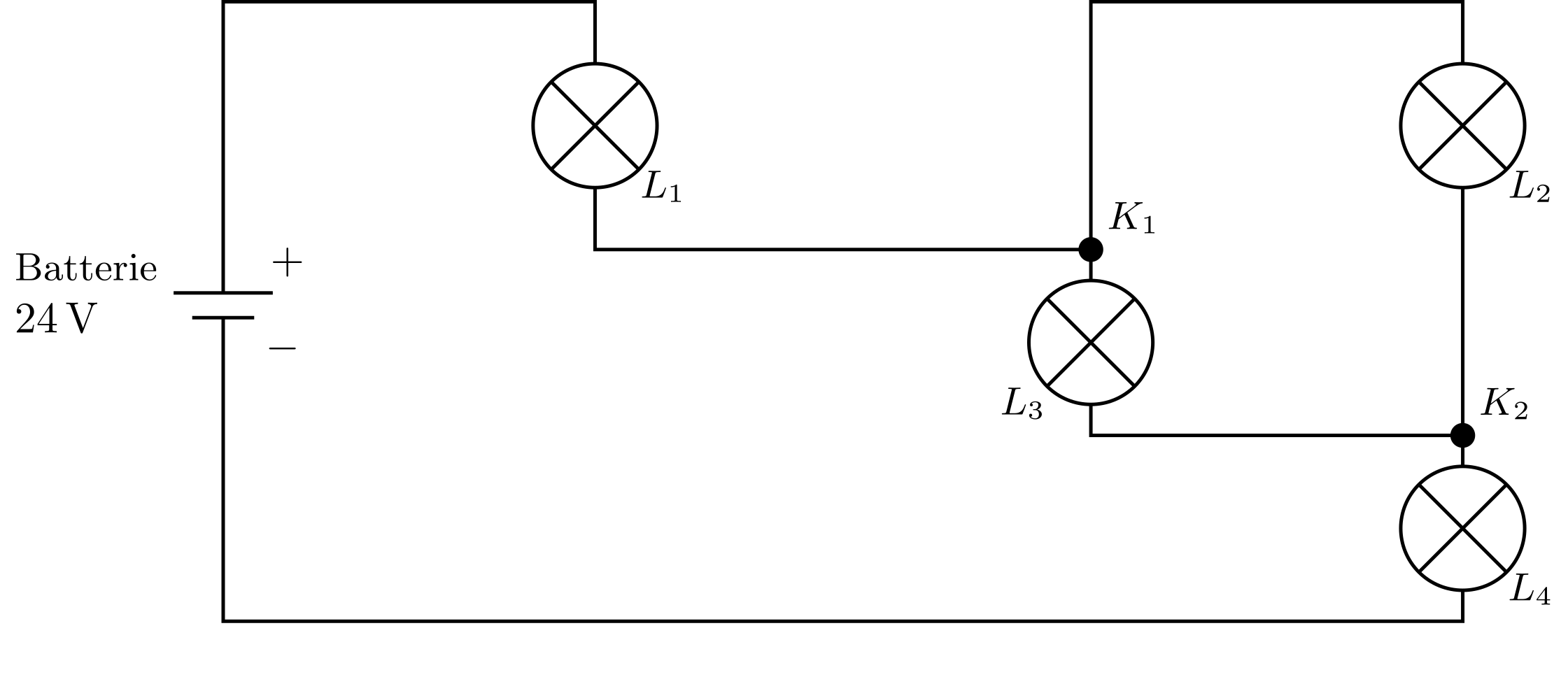
Wählen Sie eine Antwort:
Welche Lampe in dem gezeigten Stromkreis muss man herausdrehen, damit keine einzige Lampe mehr leuchtet?
Abbildung 2.1.10: Verschaltung von Lampen (C)
Wählen Sie eine Antwort:
| A. oder . | |
| B. oder . | |
| C. oder . | |
| D. oder . |
Aufgabe 2.1.27
Ein Zink-Braunstein-Element hat eine Quellenspannung von . Bei Kurzschluss fließen . Wie groß ist der Innenwiderstand ?
Antwort:
Ein Zink-Braunstein-Element hat eine Quellenspannung von . Bei Kurzschluss fließen . Wie groß ist der Innenwiderstand ?
Antwort:
Aufgabe 2.1.28
In einem Büro brennt die Deckenbeleuchtung (8 Leuchtstofflampen mit je , ) über die Urlaubszeit (14 Tage). Welche Stromkosten entstehen dadurch, wenn der Strompreis beträgt?
Wählen Sie eine Antwort:
In einem Büro brennt die Deckenbeleuchtung (8 Leuchtstofflampen mit je , ) über die Urlaubszeit (14 Tage). Welche Stromkosten entstehen dadurch, wenn der Strompreis beträgt?
Wählen Sie eine Antwort:
Hier erscheint die Testauswertung!