
4.6.2 Gedämpfte Schwingungen
Video 17: Gedämpfte Schwingungen (C)
.
Nach der Untersuchung des idealisierten Modells ohne dämpfende Reibung soll nun ein realistischeres Modell mit Reibung untersucht werden. Für einen einfachen Fall wird die Lösung angegeben.
Im Allgemeinen kann der Ausdruck für die Reibung kompliziert sein. Ein einfacher Fall ist, dass die Reibungskraft vom Betrag konstant ist und stets entgegen der Geschwindigkeit gerichtet ist (s. Amontonssche Gesetze). Hier soll ein anderer einfacher Fall betrachtet werden, nämlich dass die Reibungskraft entgegengesetzt und proportional der Geschwindigkeit ist. In mechanischen Systemen tritt dieser Fall auf, wenn ein Gegenstand langsam durch ein zähes Fluid bewegt wird und die Zähigkeit unabhängig von der Bewegungsgeschwindigkeit ist (s. Newtonsches Fluid und Reynolds-Zahl).
Mit einer positiven Konstante können wir für den Reibungsterm also schreiben.
Die Gleichung kann verhältnismäßig einfach gelöst werden, wenn komplexe Zahlen verwendet werden (s. Bemerkung). Da komplexe Zahlen aber über den Inhalt dieses Kurses hinaus führen, wird hier die allgemeine Lösung ohne Herleitung angegeben:
Die allgemeine Lösung von Gl. (4.6.1) kann mit folgenden Schreibweisen angegeben werden:
oder
oder
mit
in Gleichung (4.6.4) gilt .
Man unterscheidet drei Fälle:
In einigen Quellen ist in Gleichungen (4.6.2)–(4.6.4) für die Dämpfung nur der Faktor zu finden. Dementsprechend wird in diesen Quellen bei der Bewegungsgleichung (4.6.1) für die Proportionalitätskonstante statt eingesetzt. Bei dieser Definition sind natürlich auch die daraus folgenden Gleichungen entsprechend anzupassen.
Als Folge der geschwindigkeitsproportionalen Reibung wird die Oszillation exponentiell gedämpft und die Oszillationsfrequenz wird verringert. Die Lösung ist in den Gleichungen (4.6.2)–(4.6.4) mit dem Index versehen, da sie in der Mathematik als homogene Lösung bezeichnet wird. Im Abschnitt über erzwungene Schwingungen wird die homogene Lösung als Einschwingvorgang in Erscheinung treten.
oder
oder
mit
in Gleichung (4.6.4) gilt .
Man unterscheidet drei Fälle:
- Schwingfall (schwache oder unterkritische Dämpfung)
Skizze: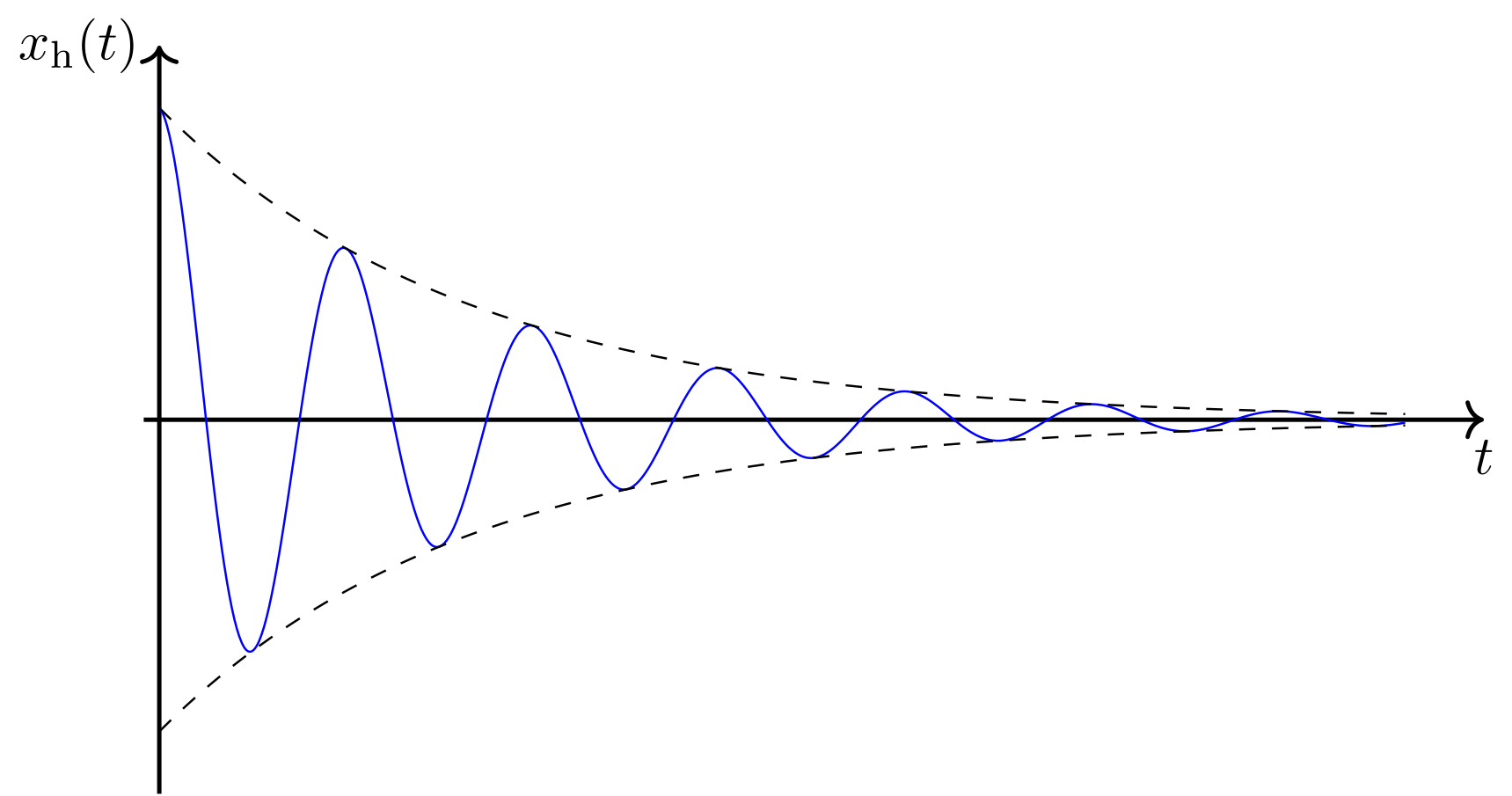 Abbildung 4.6.75: Schwache Dämpfung (C)
Abbildung 4.6.75: Schwache Dämpfung (C)
- Aperiodischer Grenzfall (kritische Dämpfung)
Skizze: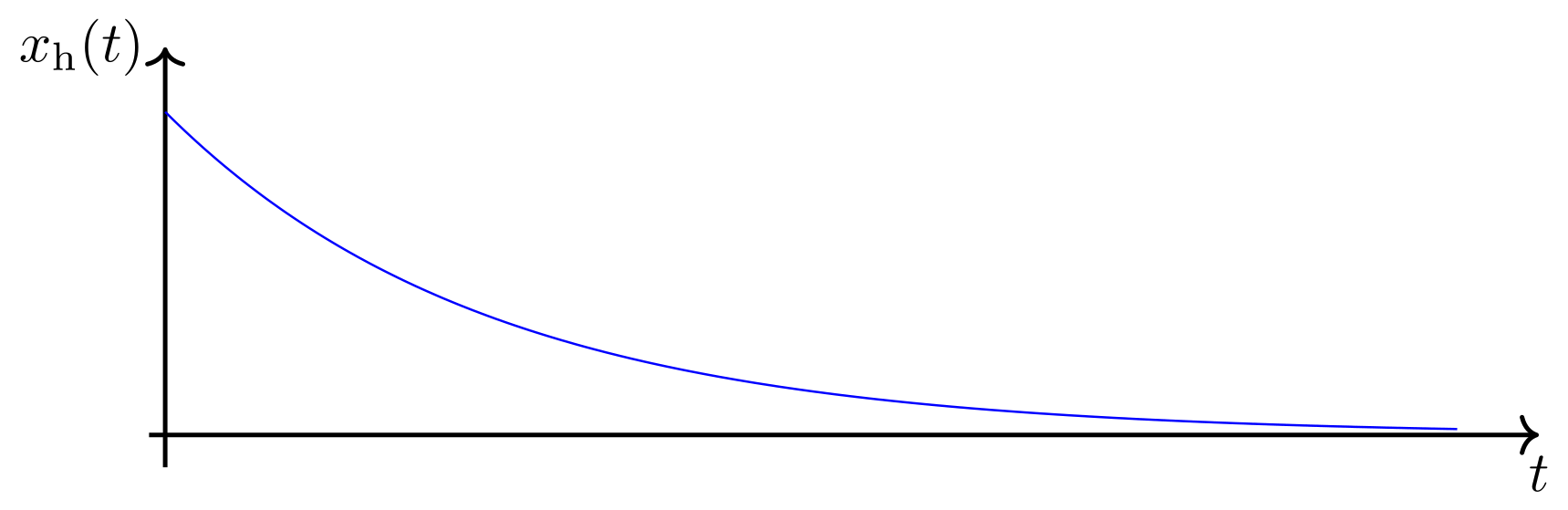 Abbildung 4.6.76: Kritische Dämpfung (C)
Abbildung 4.6.76: Kritische Dämpfung (C)
- Kriechfall (starke oder überkritische Dämpfung)
Skizze: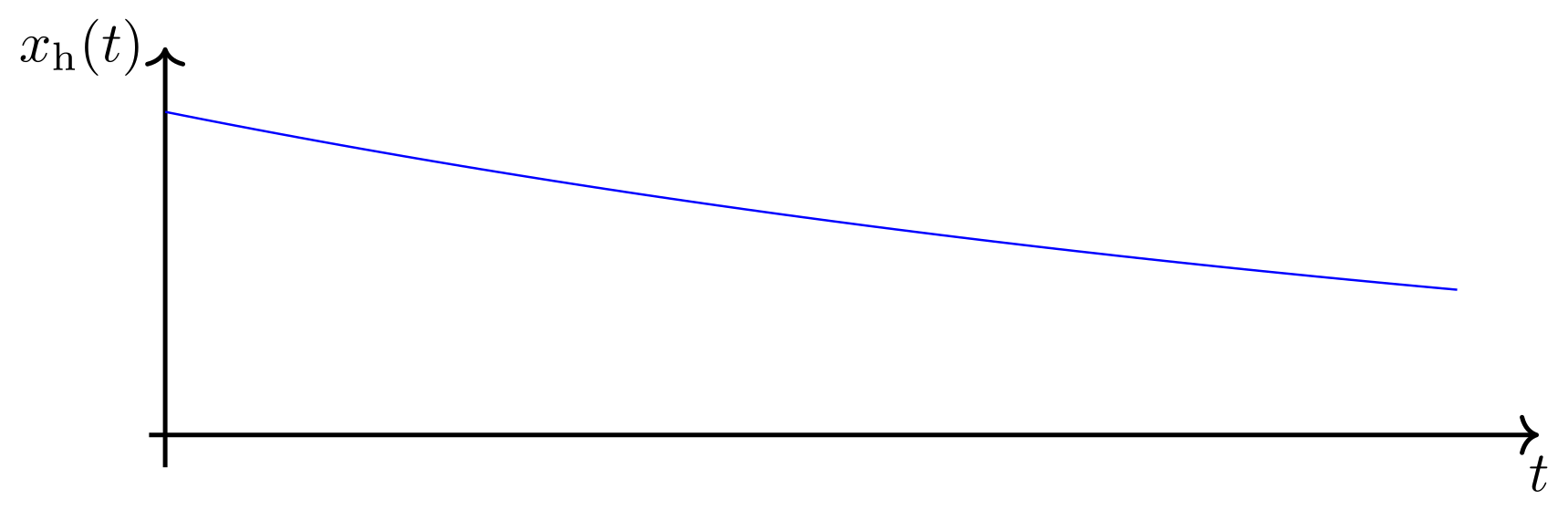 Abbildung 4.6.77: Starke Dämpfung (C)
Abbildung 4.6.77: Starke Dämpfung (C)
In einigen Quellen ist in Gleichungen (4.6.2)–(4.6.4) für die Dämpfung nur der Faktor zu finden. Dementsprechend wird in diesen Quellen bei der Bewegungsgleichung (4.6.1) für die Proportionalitätskonstante statt eingesetzt. Bei dieser Definition sind natürlich auch die daraus folgenden Gleichungen entsprechend anzupassen.
Als Folge der geschwindigkeitsproportionalen Reibung wird die Oszillation exponentiell gedämpft und die Oszillationsfrequenz wird verringert. Die Lösung ist in den Gleichungen (4.6.2)–(4.6.4) mit dem Index versehen, da sie in der Mathematik als homogene Lösung bezeichnet wird. Im Abschnitt über erzwungene Schwingungen wird die homogene Lösung als Einschwingvorgang in Erscheinung treten.