
4.5.2 Bewegungsgesetz der Rotation und Drehimpulserhaltung
Dieses Thema wird in der Schule meist nicht behandelt. Die folgende kurze Zusammenfassung kann aber dennoch eine nützliche Vorbereitung auf die Behandlung des Themas im Studium darstellen.
Video 22: Das Bewegungsgesetz der Rotation (C)
.
Das Bewegungsgesetz der Rotation (*)
Das Bewegungsgesetz der Rotation kann man herleiten, indem man auf das Bewegungsgesetz des 2. newtonschen Axioms von links das Kreuzprodukt mit anwendet:
Andererseits gilt: Bei der Ableitung eines Vektorprodukts wendet man wie bei einem normalen Produkt zweier Funktionen die Produktregel an:
weil . D.h. obiges Bewegungsgesetz kann auch geschrieben werden als
Nun führt man zwei neue physikalische Größen ein:
Das Drehmoment haben wir beim Hebelgesetz bereits definiert.
Drehmoment Kraft mal Hebelarm oder , Winkel zwischen und .
Vektoriell wird dieser Zusammenhang ausgedrückt durch das Kreuzprodukt
Des Weiteren definiert man den Drehimpuls gemäß
Daraus erhält man das Bewegungsgesetz der Rotation:
Video 23: Drehmoment und Drehimpuls (C)
.
Das Drehmoment (+)
Der Vektor des Drehmoments steht senkrecht auf den beiden Vektoren und . Für die Orientierung gilt die Rechte-Hand-Regel:
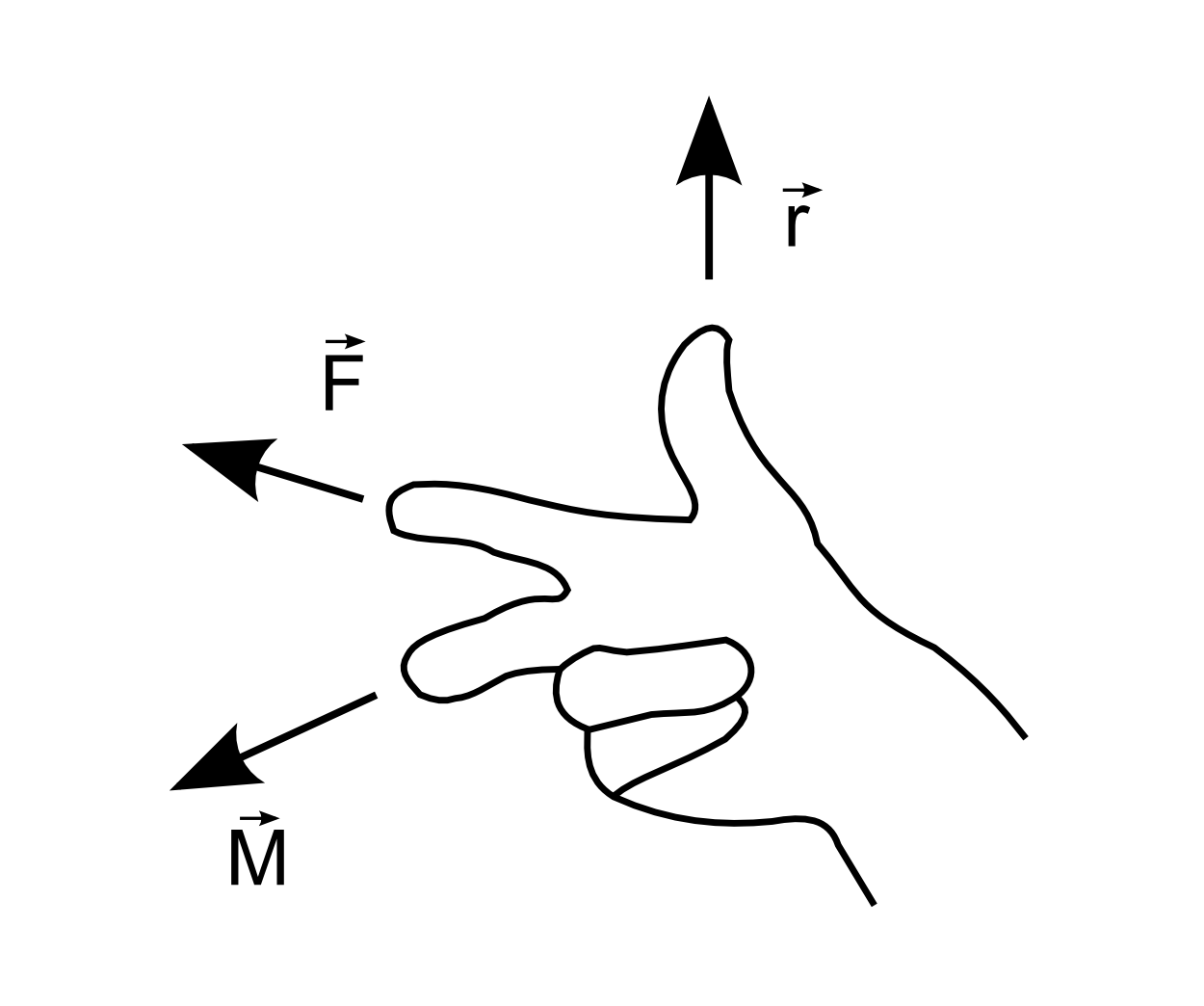
Abbildung 4.5.59: Rechte-Hand-Regel (C)
Wie oben erläutert, erhält man den Betrag des Drehmoments wie folgt:
wobei der Winkel zwischen den beiden Vektoren und ist.
Die Einheit des Drehmoments ist das Newtonmeter:
Das Newtonmeter ist zwar das gleiche Produkt aus SI-Basiseinheiten wie das Joule. Es handelt sich bei dem Drehmoment und der Energie jedoch um völlig unterschiedliche physikalische Größen. Daher darf man das Drehmoment nicht in Einheiten von Joule angeben.
In der folgenden Skizze wird die Bildung des Drehmoments veranschaulicht. Die beiden Vektoren und liegen in der -Ebene. Diese Ebene ist in der oberen Hälfte der Skizze gezeigt. Darunter dargestellt ist die -Ebene, wobei man in Richtung der -Achse schaut. Das erzeugte Drehmoment steht senkrecht auf und und damit parallel zur -Achse.
Verändern Sie den Kraftvektor bzw. den Ortsvektor und beobachten Sie, wie sich das Drehmoment ändert. Wann zeigt in, wann entgegen der -Richtung? Wann verschwindet das Drehmoment?
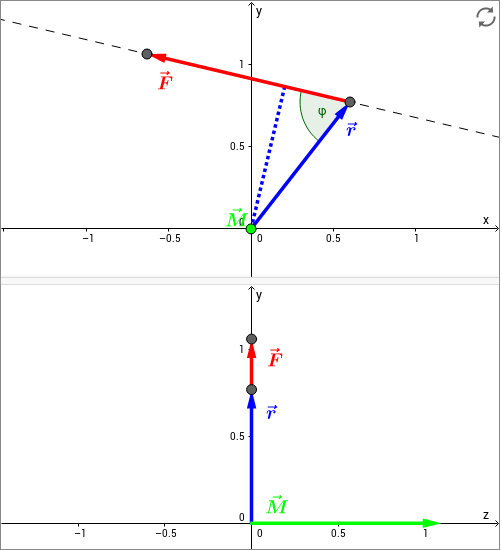
In der obigen Skizze ist zusätzlich noch die Komponente des Ortsvektors senkrecht zur angreifenden Kraft gestrichelt eingezeichnet. Da diese Komponente die Gegenkathete zu in einem rechtwinkligen Dreieck ist, beträgt ihre Länge:
Damit kann der Betrag des Drehmoments auch berechnet werden zu
Die Strecke ist der kleinste Abstand zwischen der Drehachse und einer Geraden, die durch den Angriffspunkt der Kraft in Kraftrichtung verläuft. Dieser Abstand wird auch als effektiver Hebelarm bezeichnet.
Der Drehimpuls (*)
Ganz allgemein ist für Massenpunkte , die sich am Ort mit der Geschwindigkeit bewegen, der Drehimpuls definiert als:
Eine häufige Anwendung ist jedoch der Fall, dass der Massenpunkt eine Kreisbewegung ausführt und man den Drehimpuls bezüglich des Kreismittelpunktes berechnen will. Hier stehen Geschwindigkeitsvektor und Ortsvektor senkrecht aufeinander. Die Formel für den Betrag des Drehimpulses vereinfacht sich dadurch zu
Nach dem Bewegungsgesetz der Rotation gilt:
Daraus folgt, dass sich der Drehimpuls nur dann ändert, wenn ein Drehmoment wirkt. Dies ist eine Erweiterung des 1. newtonschen Axioms. Ebenso wie der Impuls bleibt auch der Drehimpuls in abgeschlossenen Systemen erhalten. Es gilt der Drehimpulserhaltungssatz:
Man sagt dann auch, der Drehimpuls sei eine Konstante der Bewegung.
Wenn im Aufgabentext nicht anders angegeben, geben Sie die Ergebnisse auf ganze Zahlen gerundet an. Bei Angaben in wissenschaftlicher Schreibweise (Exponentialschreibweise) runden Sie auf zwei Nachkommastellen.
Falls nicht anders angegeben, verwenden Sie .
Falls nicht anders angegeben, verwenden Sie